Carregar apresentação
A apresentação está carregando. Por favor, espere

1
EE-240 Isolação de Falhas

2
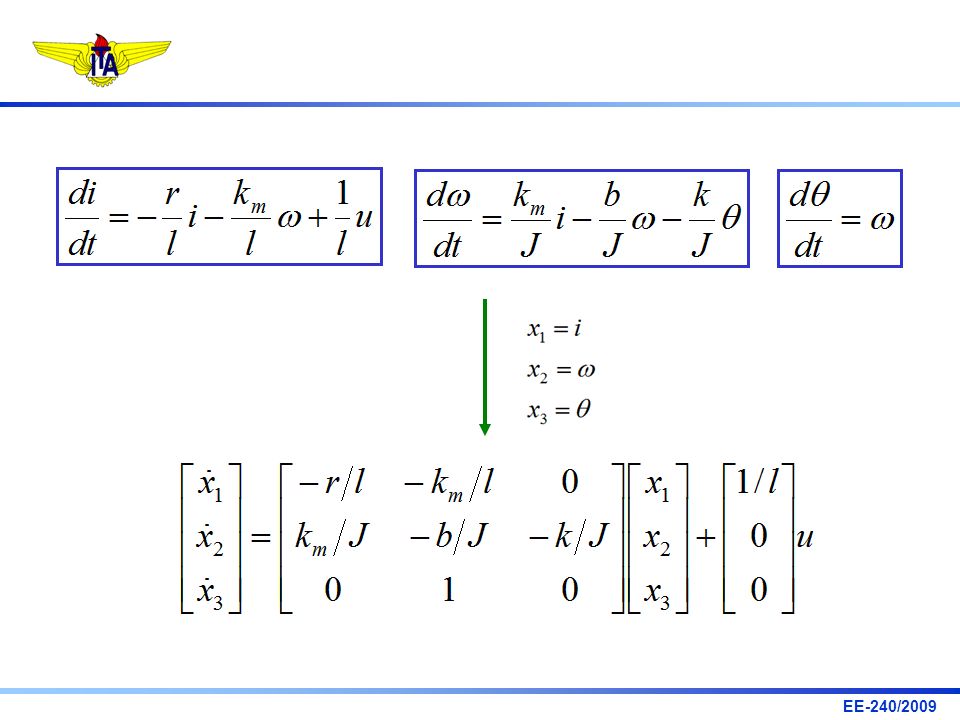
Exemplo do Motor DC Controlado pela Armadura

3
Redundância Física

4
Redundância Analítica

6
Todos os resíduos são realimentados A falha em um sensor afeta todos os resíduos.

7
Observador com realimentação de um único sensor
Falha Sensor 1 0 0

8
Falha Sensor 2 0 0

9
Falha Sensor 3

10
0 Usando realimentação do sensor 3 e1 e2 e3 Diagnóstico OK
Falha Sensor 1 Falha Sensor 2 Falha Sensor 3

11
0 Usando realimentação do sensor 2 e1 e2 e3 Diagnóstico OK
Falha Sensor 1 Falha Sensor 2 Falha Sensor 3

12
0 Usando realimentação do sensor 1 e1 e2 e3 Diagnóstico OK
Falha Sensor 1 Falha Sensor 2 Falha Sensor 3

13
Exemplo

15
r = 0.5 W, l = 0.1H km = 0.25 Vs/rad b = 0.8 Nms/rad J = 0.4 kgm2,
k = 0.8 Nm/rad Autovalores: - 4.5, -1.3 0.8j

16
Observador com Realimentação de Todos os Sensores

17
Operação Normal

18
Falha no sensor de corrente (Ganho reduzido à metade)
")
19
Observabilidade a Partir Somente do Sensor 3

20
Operação Normal

21
Falha no Sensor de Corrente (Ganho x 0.5)
")
22
Falha no Sensor de Velocidade (Ganho x 0.5)
")
23
Falha no Sensor de Posição (Ganho x 0.5)
")
24
Dedicated Observer Scheme (DOS)
Estimativa do i-ésimo estado xi por cada um dos observadores: Sejam definidos:

25
Dedicated Observer Scheme (DOS)
Estimativa do i-ésimo estado xi por cada um dos observadores: Sejam definidos: Funções de decisão:

26
Falha Sensor 1 0 0 0

27
Falha Sensor 2 0 0 0

28
Falha Sensor 3 0 0 0

29
Verificação de Observabilidade (Sensores 1 e 2)
")
30
Operação normal

31
Falha no sensor de corrente (Ganho x 0.5)
")
32
Falha no sensor de velocidade (Ganho x 0.5)
")
33
Falha no sensor de posição (Ganho x 0.5)
")
34
Muito Obrigado!

Apresentações semelhantes