Carregar apresentação
A apresentação está carregando. Por favor, espere

1
Para que usamos os vetores na dinâmica ?
Para representar: 1 - Posição no espaço de uma peça 2 - Velocidade da peça 3 - Aceleração da peça 4 - Forças atuantes sobre as peças 5 - Momentos atuantes sobre as peças

2
VELOCIDADE ANGULAR ABSOLUTA DA BASE-2 ( X2 , Y2 )
")
5
Resolução do exemplo 7 pagina 29 (ILMAR SANTOS)
Inicialmente define-se os sistemas de coordenadas inercial e móveis existentes

6
A primeira rotação ocorre no sistema inercial em torno de Y

7
A segunda rotação ocorre no sistema local B1 em torno de Z1=Z2

8
A velocidade angular absoluta do sistema B2 é composta por duas rotações consecutivas
Para se obter a velocidade angular absoluta na base 2 é necessário somar essas Velocidades usando as transformação necessárias:

10
A velocidade angular absoluta da base B2 no sistema Inercial:

11
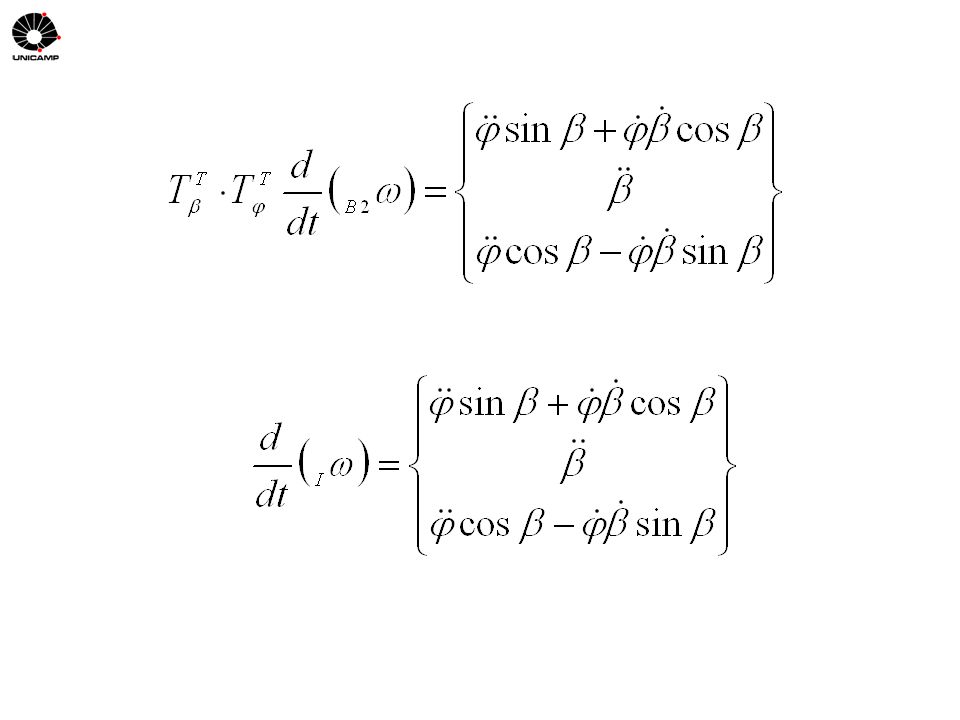
Derivando-se a velocidade linear em relação ao tempo no sistema inercial obtem-se a aceleração angular absoluta da partícula.

12
Para se evitar perda de informações a derivação de um vetor velocidade linear em aceleração deve ser feita no sistema inercial o que para velocidades angulares geralmente não é necessário.

Apresentações semelhantes