Carregar apresentação
A apresentação está carregando. Por favor, espere

1
GEOMETRIA ANALITICA VETORES

2
DEFINIÇÃO: É um segmento de reta orientado que pode representar uma Grandeza Física. Exemplos: A B Lemos: Vetor A e Vetor B

3
OBSERVAÇÃO: Algumas Grandezas Físicas não ficam bem compreendidas somente com um valor e sua unidade. Essas Grandezas são chamadas de Grandezas Vetoriais. Portanto: Grandezas Vetoriais são aquelas que para ficarem bem representadas necessitam de: Módulo, Direção e Sentido.

4
Módulo: É representado graficamente através do tamanho do vetor ou através de um valor numérico acompanhado de unidade. Direção: É a reta que dá suporte ao vetor e pode ser informada através de palavras como: horizontal, vertical, etc. Sentido: É a orientação do vetor dada pela seta e também pode ser informada através de palavras como: para esquerda, para direita, do ponto A para o ponto B, para baixo, etc.

5
Exemplo 1: Vetor A Módulo: 3 cm Direção: Vertical Sentido: Para cima A

6
Sentido: Para esquerda
Exemplo 2: B Vetor B Módulo: 5,5 cm Direção: Horizontal Sentido: Para esquerda

7
Vetores Iguais: É necessário que estes possuam as mesmas características para que sejam ditos IGUAIS. Exemplo: A C Nesse caso: Vetor A igual ao Vetor C

8
Observação: Repare a utilização do sinal “ – “
Vetores Opostos: São ditos opostos quando a única diferença entre eles é a oposição de sentido. Exemplo: A - A Nesse caso: Vetor A oposto ao Vetor - A Observação: Repare a utilização do sinal “ – “

9
Vetores Diferentes: São aqueles que possuem uma ou mais diferenças em suas características.
Nesse caso, o vetor A e o Vetor B possuem módulos diferentes. B Nesse caso, o vetor A e o Vetor B possuem direções e sentidos diferentes. A B Nesse caso, o vetor A e o Vetor B possuem sentidos diferentes. A B

10
Operações com Vetores É possível realizarmos alguma operações com vetores, aquelas que estudamos no ensino médio são: • Multiplicação e divisão de vetores por números reais; • Soma e subtração de vetores.

11
Multiplicação de vetores por números reais
Tomemos como exemplo um vetor A: A Se desejamos obter o vetor 3A, teremos: 3 A Comprove: A

12
Veja outro Exemplo A -2 A -A -A Tomemos como exemplo o mesmo vetor A:
Se desejamos obter o vetor -2 A, teremos: -2 A Comprove: -A -A

13
Divisão de vetores por números reais
Tomemos como exemplo um vetor B: B Se desejamos obter o vetor B/𝟐, teremos: B / 2

14
Soma e subtração de vetores – Casos Especiais
Vetores de Direções e Sentidos iguais: A B A + B O sentido do vetor soma é o mesmo de A e de B. O módulo do resultante é dado pela soma dos módulos dos dois vetores.

15
Soma e subtração de vetores – Casos Especiais
Vetores de mesma Direção e Sentido opostos: A B A + B Nesse caso o vetor soma terá o sentido do maior deles - o sentido do vetor B O módulo da soma será dado por B – A , ou seja, o maior menos o menor.

16
Soma e subtração de vetores – Casos Gerais
Para efetuarmos somas e subtrações vetoriais podemos utilizar duas regras, a do polígono e a do paralelogramo. A regra do polígono é muito útil quando precisamos somar três ou mais vetores; A regra do paralelogramo deve ser aplicada com grupo(s) de dois vetores.
 de dois vetores.")
17
Regra do Polígono Sejam os vetores abaixo: B C D A Vamos iniciar com o vetor C, poderíamos iniciar com qualquer um deles, veja como se utiliza a regra do polígono: D Após terminarmos ocorre a formação de um polígono. A B C Soma

18
Regra do Paralelogramo Sejam os vetores abaixo:
Vamos fazer “coincidir” o início dos dois vetores: Vamos fazer traços paralelos aos lados opostos. Soma A B Soma = A + B

19
S2 = A2 + B2 Teorema de Pitágoras
Não importa a regra utilizada, se tivermos dois vetores perpendiculares entre si, teremos o mesmo vetor resultante e seu módulo pode ser determinado utilizando o TEOREMA DE PITÁGORAS: Regra do Polígono: Regra do Paralelogramo: B S A A S B S2 = A2 + B2

20
1. Dados os vetores V1, V2 e V3 da figura a seguir, obtenha graficamente o vetor soma vetorial:

21
a) V1 + V2 V1 VR V2
 V1 + V2 V1 VR V2")
22
b) V1 + V2 + V3 VR V1 V3 V2
 V1 + V2 + V3 VR V1 V3 V2")
23
2. A soma de dois vetores ortogonais, isto é, perpendiculares entre si, um de módulo 12 e outro de módulo 16, terá módulo igual a: 16 Alternativas: 12 20 Triângulo de Pitágoras a) 4 b) Entre 12 e 16 c) 20 d) 28 Verifique: 202 = 400 = e) Maior que 28
 4. b) Entre 12 e 16. c) 20. d) 28. Verifique: 202 = = e) Maior que 28.")
24
3. A figura a seguir representa os deslocamentos de um móvel em várias etapas. Cada vetor tem módulo igual a 20 m. A distância percorrida pelo móvel e o módulo do vetor deslocamento são, respectivamente: A B

25
Distância percorrida:
20 m 20 m 20 m A 20 m 20 m B Total = 5 x 20 = 100 m

26
Módulo do vetor deslocamento:
Pelo Teorema de Pitágoras: 40 m ΔS2 = A ΔS 20 m ΔS2 = ΔS2 = 2000 B ΔS = ΔS = m Resposta: m e m

27
DECOMPOSIÇÃO DE VETORES
Um vetor V pode ser decomposto em dois vetores componentes: Vx (componente horizontal) e Vy (componente vertical), de modo que:
 e Vy (componente vertical), de modo que:")
28
VX = cos a . V y Vy = sen a . V V VY a x VX

29
Vetores Um vetor é uma matriz A que contém uma única coluna ou uma única linha. A = [ a1 a2 ... an ] ou A = [ a1 a2 ... an ] t

30
Vetores Segmento Orientado:
Uma reta define uma direção Segmento Orientado: Um segmento orientado é determinado por um par ordenado (A, B) de pontos. A é a origem e B é a extremidade do segmento orientado B B A A D C C D
 de pontos. A é a origem e B é a extremidade do segmento orientado. B B. A A. D C. C D.")
31
A cada ponto A e um vetor v fica associado um ponto B indicado por:
Dado um segmento orientado (A, B) o seu vetor correspondente é representado por AB. Quando não há o interesse na origem e extremidade do vetor podemos representar o vetor com uma letra minúscula, v. Soma de Ponto com Vetor A cada ponto A e um vetor v fica associado um ponto B indicado por: B = A + v v = B - A (Notação de Grassman)
 o seu vetor correspondente é representado por AB. Quando não há o interesse na origem e extremidade do vetor podemos representar o vetor com uma letra minúscula, v. Soma de Ponto com Vetor. A cada ponto A e um vetor v fica associado um ponto B indicado por: B = A + v v = B - A. (Notação de Grassman)")
32
Há duas formas de somarmos dois vetores:
Adição de Vetores Há duas formas de somarmos dois vetores: I. Quando a extremidade do vetor está ligada com a origem de outro. Ex: Dados dois vetores AB e BC obtenha AB + BC. B AC = AB + BC A C Basta “fechar” o triângulo formado pelos dois vetores para se obter a soma dos mesmos. u v u + v

33
A soma é obtida utilizando a REGRA DO PARALELOGRAMO.
II. Quando os dois vetores possuem a mesma origem: Ex: Dados dois vetores AB e AC obtenha AB + AC. u v u + v A C B D AD = AB + AC A soma é obtida utilizando a REGRA DO PARALELOGRAMO.

34
Multiplicação de um número real por um vetor.
Se o interesse é aumentar ou diminuir um vetor, multiplicamos tal vetor por um número maior que 1 ou por um número entre 0 e 1, respectivamente. Obs: Se multiplicarmos o vetor por um número negativo, o sentido do vetor é invertido. Ex: -u u 2u ½ u

35
Vetores Colineares Dois ou mais vetores são colineares se tiverem a mesma direção. Ex: Dados os vetores u, v , com u // v abaixo: u 2u Vetores coincidentes, colineares, “ mesma linha” u v Vetores paralelos, colineares

36
Vamos mostrar dois exemplos com relação a observação anterior:
I) Dados u e v vetores no R2 v u w w = u + v w é combinação linear de u e v Combinação linear nada mais é que a soma dos vetores ponderados por coeficientes.
 Dados u e v vetores no R2. v. u. w. w = u + v. w é combinação linear de u e v. Combinação linear nada mais é que a soma dos vetores ponderados por coeficientes.")
37
II) Dados u, v e w vetores no R3
a1u a3w a2v k K = a1u + a2v + a3w , k é combinação linear de u, v e w ponderados pelos coeficientes a1, a2, a3. Portanto u, v e w são coplanares.

38
Dependência e Independência Linear
Dados n (n≥1) vetores v1, v2, v3, ....vn, definimos os mesmos como Linearmente Dependentes, (LD) se, e somente se, existem escalares (reais) a1, a2, a3, ... Na, não nulos tais que a1v1+a2v2+a3v anvn = 0
 vetores v1, v2, v3, ....vn, definimos os mesmos como Linearmente Dependentes, (LD) se, e somente se, existem escalares (reais) a1, a2, a3, ... Na, não nulos tais que. a1v1+a2v2+a3v anvn = 0.")
39
Representação de um Vetor no Plano
Um vetor v = (x1, y1) é representado no plano (R2) conforme a figura abaixo. x1 y1 x y (x1, y1) Basta marcar os pontos dados no plano e traçar o vetor v, partindo da origem do sistema.
 é representado no plano (R2) conforme a figura abaixo. x1. y1. x. y. (x1, y1) Basta marcar os pontos dados no plano e traçar o vetor v, partindo da origem do sistema.")
40
Obs: Quando a origem do vetor não é indicada o ponto (0, 0) do plano é utilizado como ponto inicial.
Operações com Vetores no Plano Ex: Dados vetores u = (1, 1) e v = (3, 1) determine u + v. A idéia é somar coordenada com coordenada, isto é, “x com x” e “y com y”. u + v = (1, 1) + (3, 1) = (1 + 3, 1 + 1) = (4, 2)
 e v = (3, 1) determine u + v. A idéia é somar coordenada com coordenada, isto é, x com x e y com y . u + v = (1, 1) + (3, 1) = (1 + 3, 1 + 1) = (4, 2)")
41
Interpretação Geométrica
1 2 3 4 x y

42
Geometricamente vetores colineares (ou paralelos) são linearmente dependentes (L.D.), caso contrário são L.I. Algebricamente vetores colineares são múltiplos , ou seja, Caso o vetor u = kv dizemos que u e v são L.D, caso contrário são L.I. Dados 3 vetores u, v e w dizemos que estes vetores são L.D se u = a1v + a2w, caso não exista a1 e a2 os vetores são L.I.

43
Ideia Gráfica 1 2 3 4 R2 u w v R3 a1u a3w a2v k

44
Uma base é formada por vetores que são L.I.
BASES Uma base é formada por vetores que são L.I. Sejam u e v, vetores. Se u = kv u, v são L.D u, v não formam uma base. Sejam u, v e w, vetores. Se u = av + bw u, v e w são L.D u, v e w não formam uma base.

45
As bases usuais, que são chamadas de bases canônicas

46
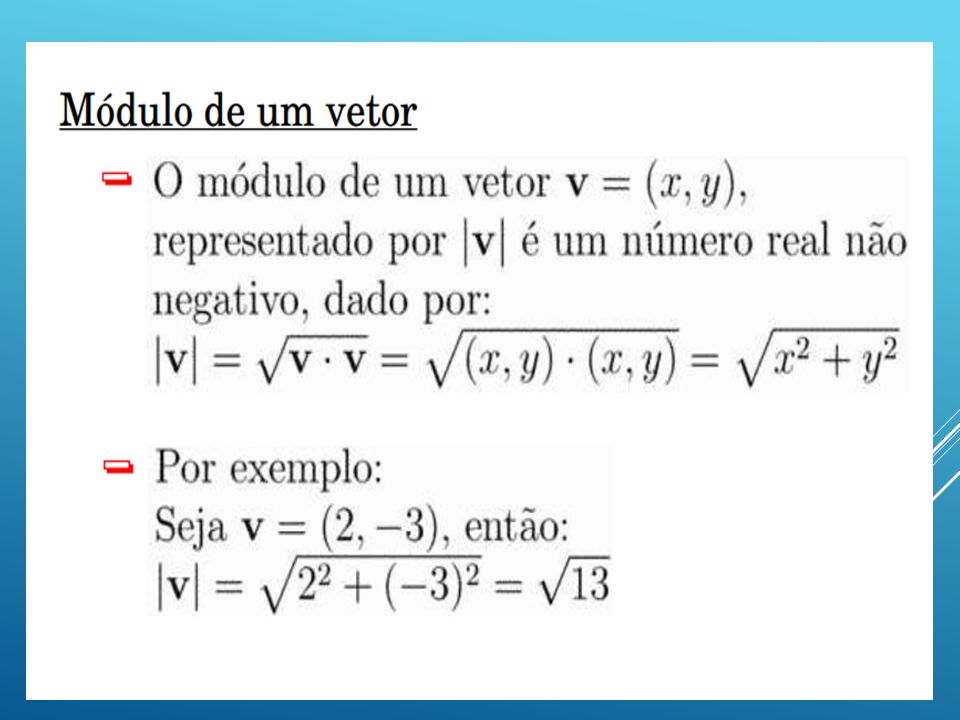
|u| = (a2 + b2) |v | = (a2 + b2 + c2)
Módulo de um Vetor Módulo de um vetorComprimento de um vetor Dados os vetores u = (a, b) e v = (a, b, c) denota-se por módulo de u e módulo de v: |u| = (a2 + b2) |v | = (a2 + b2 + c2) Usando o teorema de Pitágoras, temos: a b u |u| = (a2 + b2)
 e v = (a, b, c) denota-se por módulo de u e módulo de v: |u| = (a2 + b2) |v | = (a2 + b2 + c2) Usando o teorema de Pitágoras, temos: a. b. u. |u| = (a2 + b2)")
48
|v| = 6 |u| = 5

49
Produto Escalar de Vetores

50
Determinar o ângulo entre esses vetores.
Produto Escalar de Vetores Geometricamente, utilizamos o produto escalar entre dois vetores quando o interesse é: Determinar o ângulo entre esses vetores. vetores u = (a1, b1, c1) e v = (a2, b2, c2) é: u.v = a1.a2 + b1.b2 + c1.c2 v u Propriedades I) u.v = |u||v|cos II) Se u.v = 0 uv
 e v = (a2, b2, c2) é: u.v = a1.a2 + b1.b2 + c1.c2. v. u. Propriedades. I) u.v = |u||v|cos II) Se u.v = 0 uv.")
53
Projeção de um Vetor Dados os vetores u e v, decompondo v = v1 + v2 com v1 // u e v2 u. v2 v1 v u v2 v1 v u O vetor v1 é chamado de projeção ortogonal de v sobre u e é denotado por: v1 = proju v projuv = v.u .u u.u

54
Notação do produto vetorial: u x v.
O produto vetorial ao contrário do produto escalar resulta em um vetor. Logo o “vetor resultante” precisara ter módulo direção e sentido Notação do produto vetorial: u x v. Ex: Calcule u x v sendo que u = (a1, b1, c1) e v = (a2, b2, c2) i j k u x v = a1 b1 c1 a2 b2 c2
 e v = (a2, b2, c2) i j k. u x v = a1 b1 c1. a2 b2 c2.")
55
O vetor u x v é simultaneamente ortogonal a u e v.
Observações u x v = - (v x u), a ordem de colocação dos vetores altera o sentido do vetor resultante. u x v = 0 se e somente se u // v (vetores L.D.). O vetor u x v é simultaneamente ortogonal a u e v. u u x v v v x u Obs.:(u x v).u = e (u x v).v = 0
, a ordem de colocação dos vetores altera o sentido do vetor resultante. u x v = 0 se e somente se u // v (vetores L.D.). O vetor u x v é simultaneamente ortogonal a u e v. u. u x v. v. v x u. Obs.:(u x v).u = 0 e. (u x v).v = 0.")
56
u x v = -7i , 2j, 3k = ( -7, 2, 3) i j k u x v = a1 b1 c1 a2 b2 c2
i j k u x v = a1 b1 c1 a2 b2 c2 i j k u x v = u x v = -7i , 2j, 3k = ( -7, 2, 3)
")
57
Se é o ângulo entre os vetores u e v então: |u x v| = |u||v| sen
O |u x v| é a área de um paralelogramo de lados iguais ao |u| e |v|. |u| |v| |v| sen

58
Exemplos

59
Exemplo ( 2 )
")
60
Exemplo ( 3 )
")
Apresentações semelhantes






 no ponto onde x = x0. Chamamos esse limite, quando ele existia, de derivada de f em.>")












