Carregar apresentação
1
Respostas de segunda ordem em função da relação de amortecimento

2
Parâmetros de Desempenho de Sistemas de Segunda Ordem
Tempo de Subida: tempo para a resposta variar de 10% até 90% do seu valor final; Tempo de Estabilização: tempo necessário para que a resposta ao degrau alcance 98% do valor de estado estacionário;

3
Parâmetros de Desempenho de Sistemas de Segunda Ordem
Tempo de Pico: tempo necessário para que a resposta alcance seu valor máximo; Ultrapassagem Percentual (Sobrenível Percentual): O quanto o valor da resposta (em Percentual) ultrapassa no tempo de pico o valor de estado estacionário da resposta.
: O quanto o valor da resposta (em Percentual) ultrapassa no tempo de pico o valor de estado estacionário da resposta.")
4
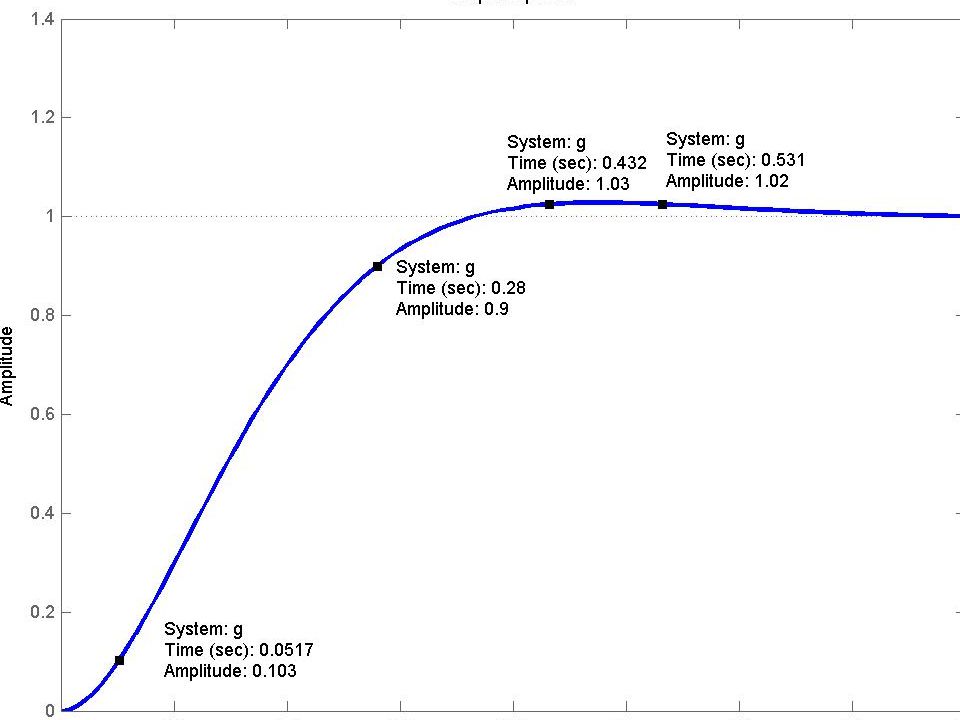
Especificações da resposta de segunda ordem subamortecida
máx 1,02 0,98 0,9 cfinal 0,1 cfinal 0,1

5
Tempo de Pico

6
Tempo de Pico

7
Percentual de Ultrapassagem (Sobrenível Percentual)
")
8
Tempo de Estabilização

10
Ultrapassagem percentual em função da relação de amortecimento
Ultrapassagem percentual,%UP 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9 Relação de amortecimento,

11
Tempo de subida normalizado versus relação de amortecimento para uma resposta de segunda ordem subamortecida Coeficiente de amortecimento Tempo de subida normalizado 3,0 0,1 1,104 0,2 1,203 2,8 0,3 1,321 2,6 0,4 1,463 0,5 1,638 2,4 0,6 1,854 2,2 0,7 2,126 Tempo de subida × Freqüência natural 2,467 2,0 0,8 0,9 2,883 1,8 1,6 1,4 1,2 1,0 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9 Relação de amortecimento

12
Respostas de segunda ordem subamortecidas com os valores da relação de amortecimento
1,8 0,1 1,6 0,2 1,4 0,4 1,2 0,5 0,6 1,0 0,8 0,8 0,6 0,4 0,2

13
Exemplo Encontre para uma entrada degrau para o sistema abaixo

15
RELAÇÃO ENTRE OS PARÂMETROS DE RESPOSTA AO DEGRAU E A POSIÇÃO DOS PÓLOS DE G(S) NO PLANO “s”
 NO PLANO s")
17
Linhas de valores constantes para tempo de pico, Tp, tempo de assentamento, Ts, e ultrapassagem percentual, %UP - Nota: %UP1 < %UP2 %UP1 %UP2 plano s

18
Respostas ao degrau de sistemas de segunda ordem subamortecidos à medida que os pólos se movem: a. com parte real constante; b. com parte imaginária constante; c. com relação de amortecimento constante. A mesma envoltória plano s Movimentação do pólo A mesma freqüência plano s Movimentação do pólo A mesma ultrapassagem plano s Movimentação do pólo

19
Exemplo: Encontre plano s

21
Resposta de Sistemas com três pólos

22
Influência de Terceiro Pólo em um sistema de Segunda Ordem
Quanto menor a Constante de Tempo do pólo menor sua influência na resposta Quanto mais a esquerda do plano “s” estiver o pólo menor será o resíduo associado a este pólo (ver exemplo a seguir)
")
23
Influência do Resíduo do Terceiro Pólo

24
Validade de aproximação de Segunda Ordem
Como os pólos adicionais devem estar o mais à esquerda do eixo imaginário, consideraremos que um sistema com três (ou mais) pólos pode ser aproximado por um Sistema de Segunda Ordem se os pólos adicionais estiverem a esquerda dos pólos dominantes, pelo menos cinco vezes mais distantes.
 pólos pode ser aproximado por um Sistema de Segunda Ordem se os pólos adicionais estiverem a esquerda dos pólos dominantes, pelo menos cinco vezes mais distantes.")
25
EXEMPLO i i

26
Respostas ao degrau dos sistemas T1(s), T2(s) e T3(s)
1,4 1,2 1,0 0,8 Resposta normalizada 0,6 0,4 0,2 0,5 1,0 1,5 2,0 2,5 3,0 Tempo (s)
")
















>")



