Carregar apresentação
A apresentação está carregando. Por favor, espere

1
Análise de Resposta em Freqüência. 8. 1. Introdução. 8. 2
Análise de Resposta em Freqüência Introdução Diagramas de Bode Construção do Diagrama de Bode com o Matlab Prof. André Marcato Livro Texto: Engenharia de Controle Moderno – Quarta Edição – Editora Pearson Prentice Hall – Autor: Katsuhiko OGATA

2
Introdução Resposta em Freqüência: Resposta em regime permanente de um sistema a uma entrada senoidal Métodos de resposta em freqüência: Varia- se a freqüência do sinal de entrada dentro de um certo intervalo e estuda-se a resposta resultante. Forma Gráfica: Diagrama de Bode ou gráfico logarítmico Diagrama de Nyquist ou diagrama polar Diagrama do Logaritmo do módulo versus ângulo de fase (carta de Nichols)
")
3
Obtenção das Respostas em Regime Permanente às Entradas Senoidais
A resposta em regime permanente da função de transferência de um sistema pode ser obtida diretamente a partir da função de transferência senoidal. Função de transferência na qual s é substituído por jw, onde w é a freqüência

4
Sistema Estável, Linear, invariante no tempo
Se a entrada for um sinal senoidal, a saída em regime permanente também será um sinal senoidal com a mesma freqüência, mas possivelmente o módulo e o ângulo de fase serão diferentes.

5
Resposta em Regime Permanente às Entradas Senoidais
Objetivo: Mostrar que após esperar até que as condições de regime permanente sejam alcançadas, a resposta em freqüência pode ser calculada substituindo-se s por jw na função de transferência. Será mostrado também que a resposta em regime permanente é dada por: Defasagem, ou diferença de fase, entre a entrada senoidal e a saída senoidal Relação de amplitude entre a saída e a entrada senoidal

6
Resposta em Regime Permanente às Entradas Senoidais

7
Resposta em Regime Permanente às Entradas Senoidais

8
Resposta em Regime Permanente às Entradas Senoidais
Multiplicando os dois lados da igualdade por e avaliando no ponto igual s = -jw Repetindo o mesmo procedimento para

9
Resposta em Regime Permanente às Entradas Senoidais

10
Resposta em Regime Permanente às Entradas Senoidais
A amplitude do sinal de saída é dada pelo produto da amplitude do sinal de entrada pelo módulo de G(jw) O ângulo de fase da saída, difere do ângulo de fase da entrada pelo valor de
 O ângulo de fase da saída, difere do ângulo de fase da entrada pelo valor de.")
11
Resposta em Regime Permanente às Entradas Senoidais

12
Resposta em Regime Permanente às Entradas Senoidais

13
Exemplo 8.1.

14
Exemplo 8.1.

15
Exemplo 8.1. Conclusões: Se w for pequeno: a defasagem da saída será pequena e a amplitude de resposta de saída será K vezes a amplitude da entrada Se w for grande: a amplitude de resposta (saída) será pequena e quase inversamente proporcional a w. A defasagem se aproxima de -90º à medida que w tende a infinito. Essa é uma rede de atraso de fase.
 será pequena e quase inversamente proporcional a w. A defasagem se aproxima de -90º à medida que w tende a infinito. Essa é uma rede de atraso de fase.")
16
Exemplo 8.2.

17
Exemplo 8.2.

18
Exemplo 8.2.

19
Diagramas de Bode Dois gráficos traçados em relação à freqüência em escala logarítmica: Gráfico do Módulo em dB Gráfico do ângulo de fase Representação padrão do logarítmo do módulo de G(jw) – a base do logarítmo é 10: A unidade da representação do módulo é o decibel (db) A multiplicação dos módulos pode ser convertida em soma.
 – a base do logarítmo é 10: A unidade da representação do módulo é o decibel (db) A multiplicação dos módulos pode ser convertida em soma.")
20
Fatores Básicos de G(jw)H(jw)
Ganho K Fatores integral e derivativo (jw)±1 Fatores de primeira ordem (1+jwT)±1 Fatores quadráticos [1+2z (jw/wn)+(jw/wn)2]±1 Uma vez familiarizados com a construção dos gráficos logarítmicos destes fatores básicos é possível utilizá-los na construção de um gráfico logarítmico composto por qualquer forma geral de G(jw)H(jw).
±1. Fatores de primeira ordem (1+jwT)±1. Fatores quadráticos [1+2z (jw/wn)+(jw/wn)2]±1. Uma vez familiarizados com a construção dos gráficos logarítmicos destes fatores básicos é possível utilizá-los na construção de um gráfico logarítmico composto por qualquer forma geral de G(jw)H(jw).")
21
O Ganho K Um número maior que uma unidade possui um valor positivo em decibéis Um número menor que uma unidade tem valor negativo A curva do módulo em dB de um ganho constante K é uma reta horizontal de valor 20 log K decibéis O ângulo de fase do ganho K é zero O efeito da variação do ganho K na função de transferência é o deslocar para cima ou para baixo a curva de módulo em dB da função de transferência por um valor constante correspondente, sem nenhum efeito na curva de ângulo.

22
Conversão de um Número de dB

23
O Ganho K - Propriedades
Quando um número aumenta de um fator 10, o valor correspondente em dB fica acrescido de 20 Estendendo a análise: O recíproco de um número difere apenas no sinal:

24
Fatores integral e derivativo (jw)±1
O valor de logarítmico de 1/jw em decibéis é: O ângulo de fase de 1/jw decibéis é constante e igual a 90. No diagrama de Bode as relações entre as freqüências são dadas em termos de oitavas e décadas: Uma oitava é um intervalo compreendido entre w1 e 2w1, onde w1 é qualquer valor de freqüência. Uma década é um intervalo compreendido entre w1 e 10w1, onde w1 é qualquer valor de freqüência. Exemplo: a distância horizontal entre w=1 e w=10 é igual a distância horizontal entre w=3 e w=30.

25
Gráfico de -20logw dB versus w
Em escala logaritmica será uma reta Localiza-se um ponto (0 dB, w=1) Como a inclinação da reta será -20dB/década (ou - 6db/Década)
 Como. a inclinação da reta será -20dB/década (ou - 6db/Década)")
26
Fatores integral e derivativo (jw)±1
De forma análoga, o módulo de jw em decibéis é: O ângulo de fase é 90o A curva do logarítmo do módulo é uma reta com inclinação de 20db/década

27
Diagrama de Bode de G(jw) = 1/jw e G(jw) = jw
 = 1/jw e G(jw) = jw")
28
Fatores integral e derivativo (jw)±1
Se a função de transferência possuir o fator (1/jw)n ou (jw)n , as grandezas logaritmicas se tornarão respectivamente: Ou As inclinações passam a ser respectivamente -20n dB/década ou 20n db/década O ângulo de fase de (1/jw)n é igual a -90.n em toda a faixa de freqüência, enquanto que o de (jw)n é igual a 90.n em toda a faixa de freqüência.
n ou (jw)n , as grandezas logaritmicas se tornarão respectivamente: Ou. As inclinações passam a ser respectivamente -20n dB/década ou 20n db/década. O ângulo de fase de (1/jw)n é igual a -90.n em toda a faixa de freqüência, enquanto que o de (jw)n é igual a 90.n em toda a faixa de freqüência.")
29
Fatores de primeira ordem (1+jwT)±1
O módulo em dB para o fator de primeira ordem 1/(1+jwT) é: Para baixas freqüências, como w << 1/T Para altas freqüências, como w >>1/T
 é: Para baixas freqüências, como w << 1/T. Para altas freqüências, como w >>1/T.")
30
Fatores de primeira ordem (1+jwT)±1
Para w>>1/T, a curva de módulo em dB é então, uma reta com inclinação de -20dB/década (ou -6db/oitava) A representação logaritmica da curva de resposta em freqüência pode ser aproximada por duas assíntotas
 A representação logaritmica da curva de resposta em freqüência pode ser aproximada por duas assíntotas.")
31
Fatores de primeira ordem (1+jwT)±1
Freqüência de canto, ou freqüência de quebra ou mudança de inclinação

32
Fatores de primeira ordem (1+jwT)±1
±1")
33
Fatores de primeira ordem (1+jwT)±1
±1")
34
Fatores de primeira ordem (1+jwT)±1
±1")
35
Fatores de primeira ordem (1+jwT)±1
A FT (1/(1+jwT) tem as características de um filtro passa- baixas. Para freqüências acima e 1/T, o módulo em dB cai rapidamente para o infinito No filtro passa baixas, a saída pode seguir, com fidelidade, a entrada senoidal para baixas freqüências Em altas freqüências, a amplitude tende a zero e o ângulo de fase de saída tende a -90º. Se a entrada tem muitos harmônicos, os componentes de baixa freqüência são reproduzidos com fidelidade na saída, enquanto os componentes de alta freqüência são atenuados na amplitude ou defasados. Um elemento de primeira ordem fornece uma duplicação na saída somente para fenômenos constantes ou lentamente variáveis.
 tem as características de um filtro passa- baixas. Para freqüências acima e 1/T, o módulo em dB cai rapidamente para o infinito. No filtro passa baixas, a saída pode seguir, com fidelidade, a entrada senoidal para baixas freqüências. Em altas freqüências, a amplitude tende a zero e o ângulo de fase de saída tende a -90º. Se a entrada tem muitos harmônicos, os componentes de baixa freqüência são reproduzidos com fidelidade na saída, enquanto os componentes de alta freqüência são atenuados na amplitude ou defasados. Um elemento de primeira ordem fornece uma duplicação na saída somente para fenômenos constantes ou lentamente variáveis.")
36
Fatores de primeira ordem (1+jwT)±1
±1")
37
Fatores de primeira ordem (1+jwT)±n
±n")
38
Fatores quadráticos [1+2z (jw/wn)+(jw/wn)2]±1
![Fatores quadráticos [1+2z (jw/wn)+(jw/wn)2]±1](http://slideplayer.com.br/slide/290919/1/images/38/Fatores+quadr%C3%A1ticos+%5B1%2B2z+%28jw%2Fwn%29%2B%28jw%2Fwn%292%5D%C2%B11.jpg "Fatores quadráticos [1+2z (jw/wn)+(jw/wn)2]±1")
39
Fatores quadráticos [1+2z (jw/wn)+(jw/wn)2]±1
As aproximações assintóticas para as curvas de resposta em freqüência não são precisas para um fator com baixos valores de z. O módulo e a fase do fator quadrático dependem tanto da freqüência de canto como do coeficiente de amortecimento z.
![Fatores quadráticos [1+2z (jw/wn)+(jw/wn)2]±1](http://slideplayer.com.br/slide/290919/1/images/39/Fatores+quadr%C3%A1ticos+%5B1%2B2z+%28jw%2Fwn%29%2B%28jw%2Fwn%292%5D%C2%B11.jpg "As aproximações assintóticas para as curvas de resposta em freqüência não são precisas para um fator com baixos valores de z. O módulo e a fase do fator quadrático dependem tanto da freqüência de canto como do coeficiente de amortecimento z.")
40
Fatores quadráticos [1+2z (jw/wn)+(jw/wn)2]±1
Para baixas freqüências, como w << wn Para altas freqüências, como w >>wn
![Fatores quadráticos [1+2z (jw/wn)+(jw/wn)2]±1](http://slideplayer.com.br/slide/290919/1/images/40/Fatores+quadr%C3%A1ticos+%5B1%2B2z+%28jw%2Fwn%29%2B%28jw%2Fwn%292%5D%C2%B11.jpg "Para baixas freqüências, como w << wn. Para altas freqüências, como w >>wn.")
41
Fatores quadráticos [1+2z (jw/wn)+(jw/wn)2]±1
![Fatores quadráticos [1+2z (jw/wn)+(jw/wn)2]±1](http://slideplayer.com.br/slide/290919/1/images/41/Fatores+quadr%C3%A1ticos+%5B1%2B2z+%28jw%2Fwn%29%2B%28jw%2Fwn%292%5D%C2%B11.jpg "Fatores quadráticos [1+2z (jw/wn)+(jw/wn)2]±1")
42
Fatores quadráticos [1+2z (jw/wn)+(jw/wn)2]±1
![Fatores quadráticos [1+2z (jw/wn)+(jw/wn)2]±1](http://slideplayer.com.br/slide/290919/1/images/42/Fatores+quadr%C3%A1ticos+%5B1%2B2z+%28jw%2Fwn%29%2B%28jw%2Fwn%292%5D%C2%B11.jpg "Fatores quadráticos [1+2z (jw/wn)+(jw/wn)2]±1")
43
Fatores quadráticos [1+2z (jw/wn)+(jw/wn)2]±1
![Fatores quadráticos [1+2z (jw/wn)+(jw/wn)2]±1](http://slideplayer.com.br/slide/290919/1/images/43/Fatores+quadr%C3%A1ticos+%5B1%2B2z+%28jw%2Fwn%29%2B%28jw%2Fwn%292%5D%C2%B11.jpg "Fatores quadráticos [1+2z (jw/wn)+(jw/wn)2]±1")
44
Fatores quadráticos [1+2z (jw/wn)+(jw/wn)2]±1
![Fatores quadráticos [1+2z (jw/wn)+(jw/wn)2]±1](http://slideplayer.com.br/slide/290919/1/images/44/Fatores+quadr%C3%A1ticos+%5B1%2B2z+%28jw%2Fwn%29%2B%28jw%2Fwn%292%5D%C2%B11.jpg "Fatores quadráticos [1+2z (jw/wn)+(jw/wn)2]±1")
45
Fatores quadráticos [1+2z (jw/wn)+(jw/wn)2]±1
![Fatores quadráticos [1+2z (jw/wn)+(jw/wn)2]±1](http://slideplayer.com.br/slide/290919/1/images/45/Fatores+quadr%C3%A1ticos+%5B1%2B2z+%28jw%2Fwn%29%2B%28jw%2Fwn%292%5D%C2%B11.jpg "Fatores quadráticos [1+2z (jw/wn)+(jw/wn)2]±1")
46
Fatores quadráticos [1+2z (jw/wn)+(jw/wn)2]±1
![Fatores quadráticos [1+2z (jw/wn)+(jw/wn)2]±1](http://slideplayer.com.br/slide/290919/1/images/46/Fatores+quadr%C3%A1ticos+%5B1%2B2z+%28jw%2Fwn%29%2B%28jw%2Fwn%292%5D%C2%B11.jpg "Fatores quadráticos [1+2z (jw/wn)+(jw/wn)2]±1")
47
Fatores quadráticos [1+2z (jw/wn)+(jw/wn)2]±1
![Fatores quadráticos [1+2z (jw/wn)+(jw/wn)2]±1](http://slideplayer.com.br/slide/290919/1/images/47/Fatores+quadr%C3%A1ticos+%5B1%2B2z+%28jw%2Fwn%29%2B%28jw%2Fwn%292%5D%C2%B11.jpg "Fatores quadráticos [1+2z (jw/wn)+(jw/wn)2]±1")
48
Freqüência de Ressonância wr e Pico de Ressonância Mr
g(w)
")
49
Freqüência de Ressonância wr e Pico de Ressonância Mr

50
Freqüência de Ressonância wr e Pico de Ressonância Mr

51
Freqüência de Ressonância wr e Pico de Ressonância Mr

52
Freqüência de Ressonância wr e Pico de Ressonância Mr

53
Procedimentos Geral para a Construção do Diagrama de Bode
Reescreve-se a função de transferência senoidal G(jw)H(jw) como produto de fatores básicos. Identifica-se a freqüência de canto associada a estes fatores básicos Traça-se as curvas assitóticas com módulo em dB com as inclinações apropriadas entre as freqüências de canto A curva do ângulo de fase pode ser obtida adicionando-se as curvas de ângulo de fase dos fatores individuais
H(jw) como produto de fatores básicos. Identifica-se a freqüência de canto associada a estes fatores básicos. Traça-se as curvas assitóticas com módulo em dB com as inclinações apropriadas entre as freqüências de canto. A curva do ângulo de fase pode ser obtida adicionando-se as curvas de ângulo de fase dos fatores individuais.")
54
Exemplo 8.3.

55
Exemplo 8.3.

56
Exemplo 8.3.

57
Exemplo 8.3.

58
Exemplo 8.3.

59
Exemplo 8.3.

60
Sistemas de Fase Mínima e Não Mínima

61
Sistemas de Fase Mínima e Não Mínima

62
Sistemas de Fase Mínima e Não Mínima
Os valores dos ângulos de fase são menores para o sistema de fase mínima (G1) para todas as freqüências
 para todas as freqüências.")
63
Sistemas de Fase Mínima e Não Mínima

64
Sistemas de Fase Mínima e Não Mínima
Para sistemas de fase mínima, as características de módulo e de ângulo de fase estão relacionadas univocamente. Se a curva de módulo de um sistema for especificada para toda a gama de valores de freqüência de zero a infinito, a curva de ângulo de fase será determinada de forma única e vice-versa Isto não ocorre para sistemas de fase não- mínima.

65
Sistemas de Fase Mínima e Não Mínima
Para sistemas de fase mínima: O ângulo de fase em w=∞ torna-se -900(p-q), onde p e q são os graus dos polinômios do numerador e do denominador da função de transferência, respectivamente. A inclinação da curva de módulo em dB em w=∞ é igual a -20(p-q)/década (esta condição vale também para os sistemas de fase não- mínima).
, onde p e q são os graus dos polinômios do numerador e do denominador da função de transferência, respectivamente. A inclinação da curva de módulo em dB em w=∞ é igual a -20(p-q)/década (esta condição vale também para os sistemas de fase não- mínima).")
66
Retardo no Transporte Tem comportamento de fase não- mínima e apresenta atraso excessivo, sem atenuação nas altas freqüências Esses retardos de transporte normalmente ocorrem nos sistemas térmicos, hidráulicos e pneumáticos

67
Retardo no Transporte

68
Retardo no Transporte

69
Exemplo 8.4.

70
Exemplo 8.4.

71
Exemplo 8.4.

72
Relacionamento entre o Tipo de Sistema e a Curva do Módulo em dB

73
Determinação do Erro Estático de Posição

74
Determinação do Erro Estático de Posição

75
Determinação do Erro Estático de Velocidade

76
Determinação do Erro Estático de Posição

77
Determinação do Erro Estático de Posição

78
Determinação do Erro Estático de Posição

79
Determinação da Constante do Erro Estático de Aceleração

80
Determinação da Constante do Erro Estático de Aceleração

81
Determinação da Constante do Erro Estático de Aceleração

82
Construção do Diagrama de Bode com o Matlab

83
Construção do Diagrama de Bode com o Matlab

84
Construção do Diagrama de Bode com o Matlab

85
Exemplo 8.5

86
Exemplo 8.5.

87
Exemplo 8.6

88
Exemplo 8.6

89
Exemplo 8.6.

90
Exemplo 8.6.

91
Exemplo 8.6.

92
Exemplo 8.6.

93
Exemplo 8.6.

94
Exemplo 8.6.

95
Exemplo 8.6.

96
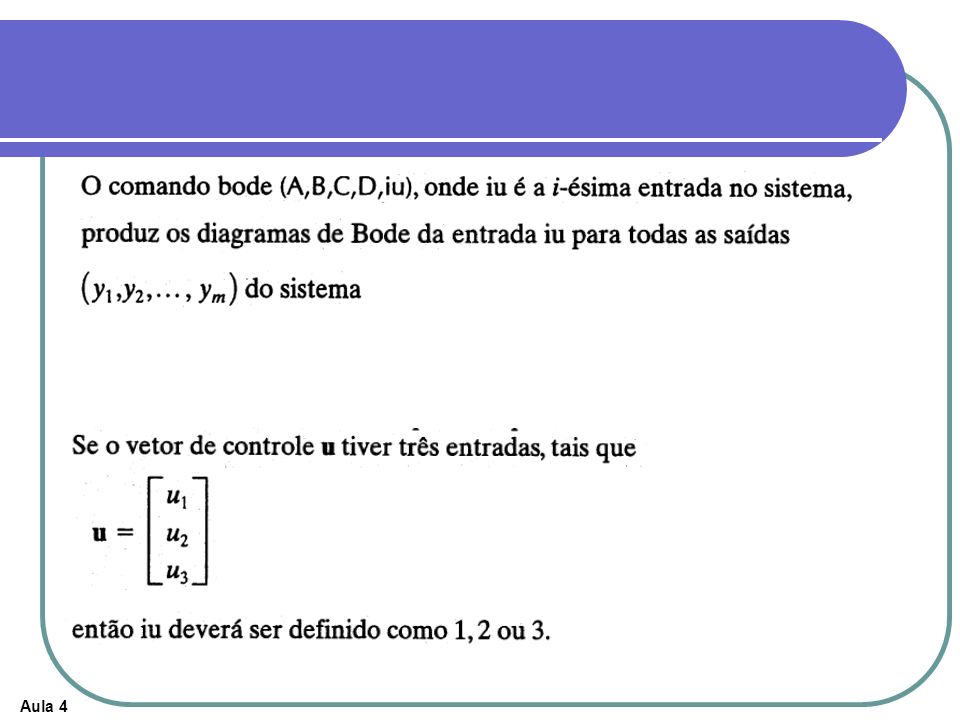
Obtenção dos Diagramas de Bode nos Sistemas Definidos no Espaço de Estados

98
Exemplo 8.7.

Apresentações semelhantes