Carregar apresentação
A apresentação está carregando. Por favor, espere

1
DIAGRAMAS DE BODE NYQUIST E NICHOLS

2
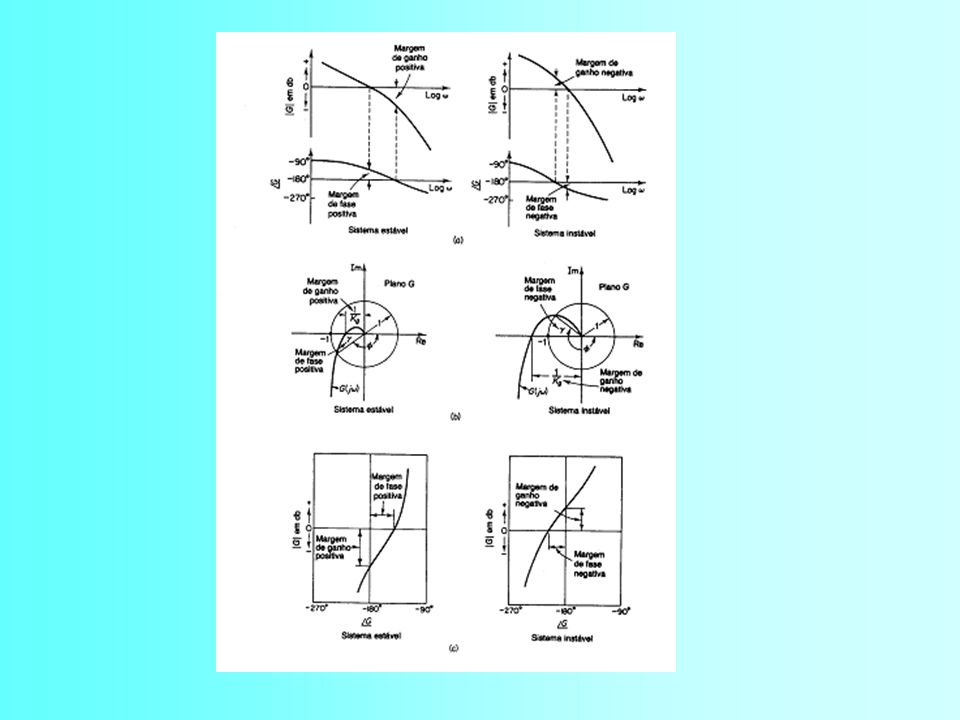
Os diagramas de resposta em freqüência são muito úteis para analisar a estabilidade de um sistema realimentado. 1) diagramas de Bode; 2) diagrama de Nyquist; 3) diagrama de Nichols.
 diagramas de Bode; 2) diagrama de Nyquist; 3) diagrama de Nichols.")
3
Os três diagramas contém as mesmas informações
Os três diagramas contém as mesmas informações. O que muda é como estas informações estão disponíveis ao projetista. Eles são obtidos através da função de transferência em malha aberta.

4
DIAGRAMAS DE BODE

5
DIAGRAMA DE NYQUIST

6
DIAGRAMA DE NICHOLS

8
INFORMAÇÕES DO SISTEMA EM MALHA FECHADA
Já foi falado que toda a análise de estabilidade é feita em cima das informações do sistema em malha aberta. Mas algumas características do sistema em malha fechada podem ser muito úteis para se analisar o sistema.

9
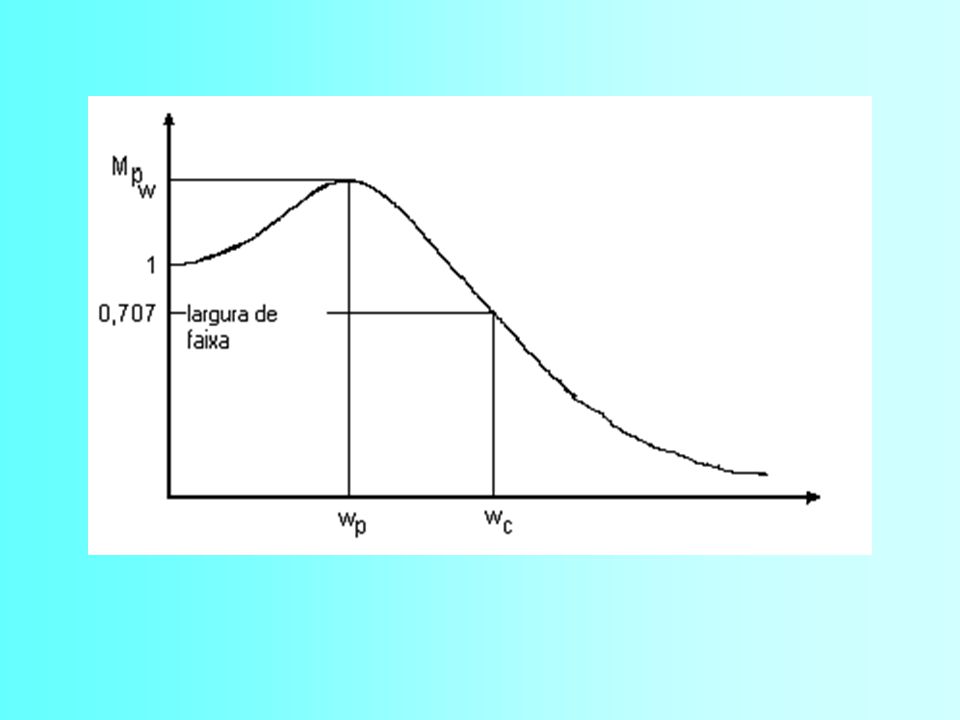
1) Pico de ressonância Mp
é definido como o valor máximo de M() dado pela equação M() = módulo | G(j) / (1 + G(j))|
 dado pela equação. M() = módulo | G(j) / (1 + G(j))|")
10
Mp dá uma indicação da estabilidade relativa do sistema de controle realimentado.
Normalmente um Mp grande corresponde a um pico elevado de sobressinal na resposta degrau. O valor ótimo de Mp deve estar entre 1,1 e 1,5.

11
2) Freqüência de ressonância p
- é definida como a freqüência na qual o pico de ressonância Mp ocorre.

12
3) Largura de faixa - é definida como a freqüência na qual o módulo de M(j) cai a 70,7 por cento da seu nível na freqüência zero, ou 3dB abaixo do ganho da freqüência zero.
 cai a 70,7 por cento da seu nível na freqüência zero, ou 3dB abaixo do ganho da freqüência zero.")
13
A largura de faixa fornece uma indicação da velocidade do sistema.
Um sistema com uma grande largura de faixa corresponde a um tempo de subida pequeno.

15
LARGURA DE FAIXA DO SISTEMA
A largura de faixa (ou largura de banda) de um sistema de controle a malha fechada é uma boa medida do intervalo de fidelidade da resposta do sistema. A velocidade de resposta a uma entrada do tipo degau será proporcional a wB
 de um sistema de controle a malha fechada é uma boa medida do intervalo de fidelidade da resposta do sistema. A velocidade de resposta a uma entrada do tipo degau será proporcional a wB.")
16
Por exemplo: sistemas em Malha Fechada

17
Por exemplo: sistemas em Malha Fechada

18
-A taxa de amortecimento para os sistemas é a mesma: =0,5.
-A freqüência natural não amortecida é 10 e 30 para os sistemas T3 e T4, respectivamente. -Ambos os sistemas possuem sobrepasso de 15%, mas T4 possui um tempo de pico de 0,12 segundos, comparado a 0,36 segundos para T3. -Observe também que o tempo de assentamento (ou de estabilização ou de acomodação) para T4 é de 0.37 segundos, enquanto que é de 0,9 segundos para T3
 para T4 é de 0.37 segundos, enquanto que é de 0,9 segundos para T3.")
19
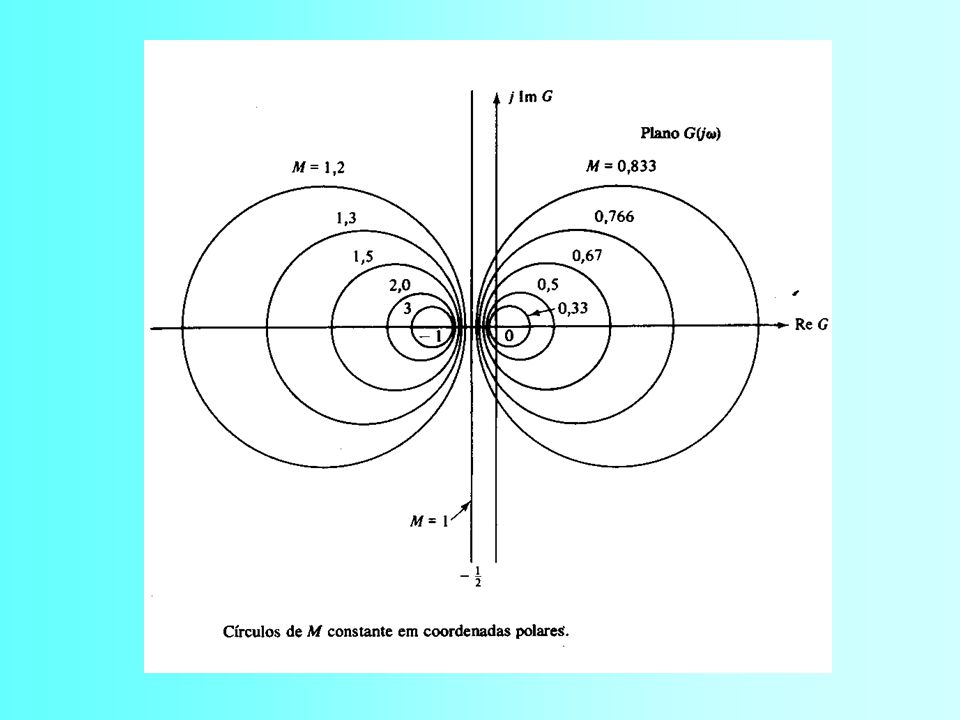
LUGARES DE M CONSTANTES NO PLANO G(j)
Dado um sistema em malha fechada com realimentação unitária M(s) = C(s) = G(s) R(s) G(s)
 = C(s) = G(s) R(s) 1 + G(s)")
20
G(j)= Re G(j) + jIm G(j)= x+jy.
Reescrevendo: G(j)= Re G(j) + jIm G(j)= x+jy. Substituindo na equação do módulo | M(s) | = G(s) = (x2 + y2) 1 + G(s) [(1+x)2 + y2] Resulta na equação de um círculo [x - M2/(1-M2) ]2 + y2 = [M/(1-M2)]2
= Re G(j) + jIm G(j)= x+jy. Substituindo na equação do módulo. | M(s) | = G(s) = (x2 + y2) 1 + G(s) [(1+x)2 + y2] Resulta na equação de um círculo. [x - M2/(1-M2) ]2 + y2 = [M/(1-M2)]2.")
22
As intersecções entre o gráfico G(j) e os lugares de M constante dão os valores do módulo em malha fechada na freqüência indicada sobre a curva de G(j). Se for desejado manter o valor de Mp menor do que um certo valor, a curva G(j) não deve interceptar o círculo correspondente de M neste ponto, e ao mesmo tempo não envolver o ponto (-1, j0).
 não deve interceptar o círculo correspondente de M neste ponto, e ao mesmo tempo não envolver o ponto (-1, j0).")
23
Diagramas polares de G(s) e lugares de M constante, mostrando o procedimento de determinação de Mp e das curvas de módulo.
 e lugares de M constante, mostrando o procedimento de determinação de Mp e das curvas de módulo.")
24
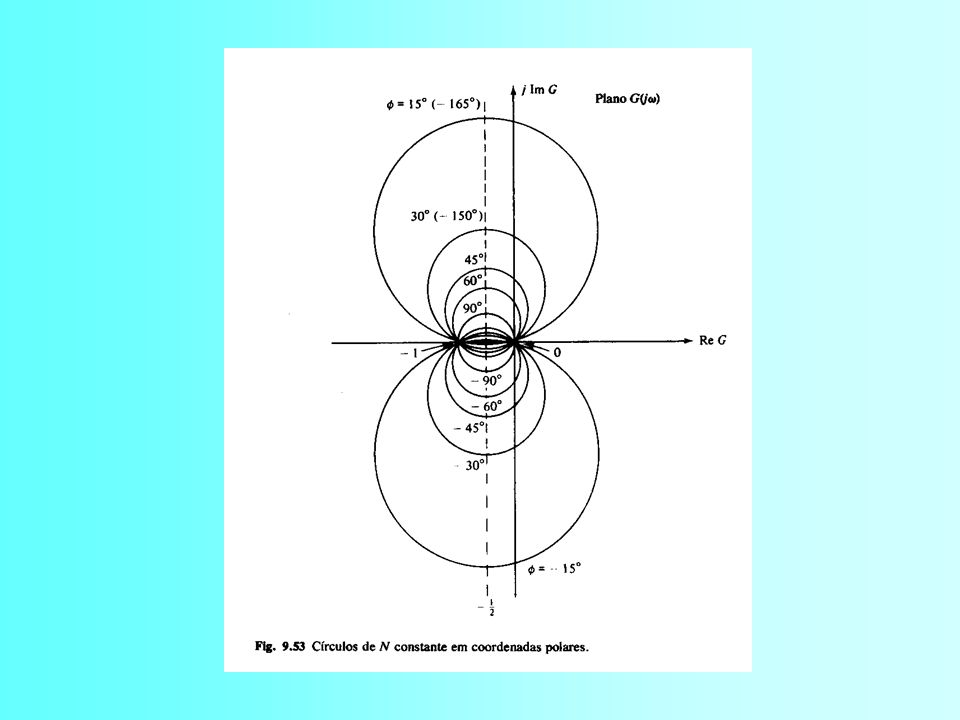
LUGARES DE FASE CONSTANTE NO PLANO G(j)
M(jw) = G(jw) e G(jw) = x +jy 1 + G(jw) Faz-se M(j) = G(j) (1+G(j)) fm(w) = M(jw) = tan-1 (y/x) - tan-1(y/(1+x)) Fazendo N=tanm, esta equação pode ser escrita como uma família de círculos
 = G(jw) e G(jw) = x +jy. 1 + G(jw) Faz-se M(j) = G(j) - (1+G(j)) fm(w) = M(jw) = tan-1 (y/x) - tan-1(y/(1+x)) Fazendo N=tanm, esta equação pode ser escrita como. uma família de círculos.")
26
LUGARES DE M e N CONSTANTES NO PLANO MÓDULO VERSUS FASE - CARTA DE NICHOLS
A desvantagem em se trabalhar com coordenadas polares para o gráfico de G(j) é que a curva se altera quando é feita alguma alteração, como por exemplo uma mudança de ganho. No gráfico de módulo em função da fase, toda a curva G(j) é deslocada quando o ganho é alterado.
 é que a curva se altera quando é feita alguma alteração, como por exemplo uma mudança de ganho. No gráfico de módulo em função da fase, toda a curva G(j) é deslocada quando o ganho é alterado.")
27
Os lugares de M e N constantes em coordenadas polares podem ser transferidos para coordenadas de módulo em função da fase.

28
Carta de Nichols

29
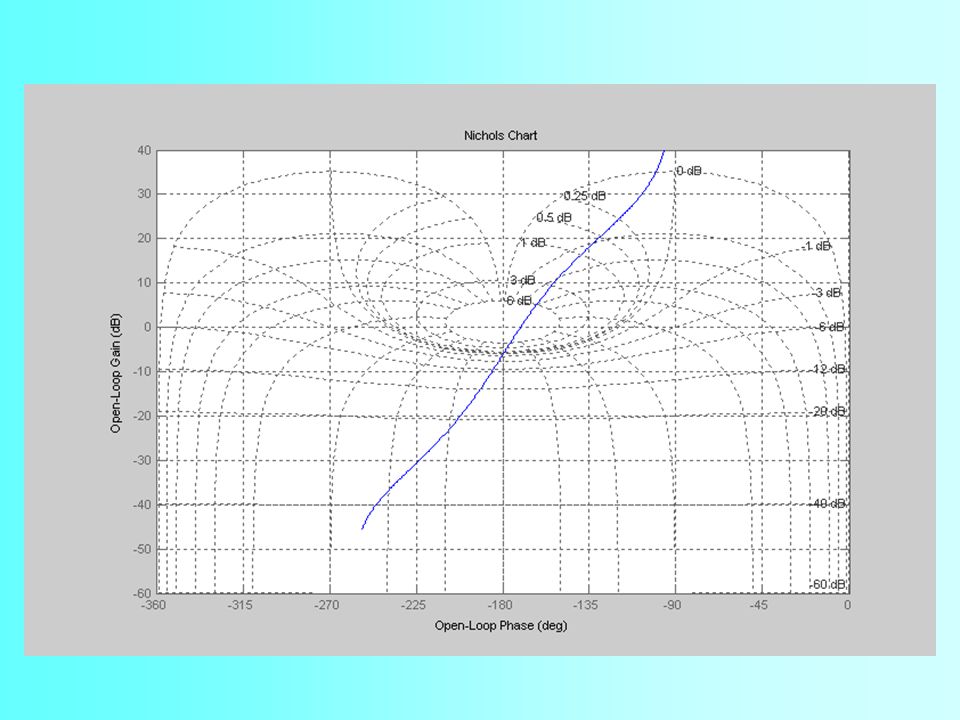
USO DO MATLAB n1=[1/120 1] n2=[-1/2 1] d1=[1 0] d2=[1/.1 1]
n=conv(n1,n2) d=conv(d1,d2) sys=tf(n,d) %graficos de nichols w=logspace(-2,1,400) nichols(sys,w) ngrid grid
![USO DO MATLAB n1=[1/120 1] n2=[-1/2 1] d1=[1 0] d2=[1/.1 1]](http://slideplayer.com.br/slide/3658043/12/images/29/USO+DO+MATLAB+n1%3D%5B1%2F120+1%5D+n2%3D%5B-1%2F2+1%5D+d1%3D%5B1+0%5D+d2%3D%5B1%2F.1+1%5D.jpg "n=conv(n1,n2) d=conv(d1,d2) sys=tf(n,d) %graficos de nichols. w=logspace(-2,1,400) nichols(sys,w) ngrid. grid.")
31
RELAÇÃO COEFICIENTE DE AMORTECIMENTO E MARGEM DE FASE

Apresentações semelhantes