Carregar apresentação
1
MODELAGEM DINÂMICA DE SISTEMAS MECÂNICOS
OBJETIVOS Quantificar e visualizar movimentos e trajetórias descritas por peças de um mecanismo; Propiciar o dimensionamento de peças submetidas a cargas dinâmicas; Otimizar o projeto da peça; Reduzir a necessidade de confeccionar protótipos; Produzir ganhos significativos de tempo, com consequente redução de custos.

2
MODELAGEM DINÂMICA DE SISTEMAS MECÂNICOS
Modelagens desenvolvidas na FEAGRI Roçadora com faca articulada; Garfos flutuantes pantográficos de rastelamento de cana; Molinete com dedos retráteis de colhedora de grãos; Garfos alimentadores de enfardadora; Cortador de base de cana, com dois graus de liberdade.

3
Molinete com dedos retráteis de colhedora de grãos

4
Cortador de base de cana, com dois graus de liberdade.

5
Cinemáica e Cinética de Partículas no Plano e no Espaço
Sistema de Referência Inercial e vetor posição de um ponto “ A “ X Y Z O Zo trajetória A Vetor posição que acompanha a trajetória descrita pela partícula A. Xo rOA i j k Yo

6
Cinemáica e Cinética de Partículas no Plano e no Espaço
Vetor velocidade absoluta O vetor velocidade absoluta da partícula A, corresponde à derivada primeira no tempo do vetor posição IrOA, no sistema de referência inercial. Vetor velocidade absoluta que descreve a velocidade da partícula A que percorre a trajetória

7
Cinemáica e Cinética de Partículas no Plano e no Espaço
Vetor aceleração absoluta O vetor aceleração absoluta da partícula A, corresponde à derivada segunda no tempo do vetor posição IrOA, no sistema de referência inercial. Vetor aceleração absoluta da partícula “A “que descreve ma certa trajetória

8
Cinemáica e Cinética de Partículas no Plano e no Espaço
Sistema de Referência Móvel Todo e qualquer movimento pode ser descrito como uma composição destes dois tipos de movimentos: translação e rotação.

9
Cinemáica e Cinética de Partículas no Plano e no Espaço
Sistema de Referência Móvel Transladando X1 Y1 Z1 A X Y Z O ZB ZA XA YA trajetória B i1 j1 k1 rAB YB rOA i j k XB

10
Cinemáica e Cinética de Partículas no Plano e no Espaço
Sistema de Referência Móvel Transladando X1 Y1 Z1 A X Y Z O ZB ZA XA YA trajetória B i1 j1 k1 rAB YB rOA i j k XB

11
Cinemáica e Cinética de Partículas no Plano e no Espaço
Vetor velocidade absoluta O vetor velocidade absoluta da partícula B, corresponde à derivada primeira no tempo do vetor posição IrOB, no sistema de referência inercial. Vetor velocidade absoluta que descreve a velocidade da trajetória descrita pela partícula B, na base inercial. =0

12
Cinemáica e Cinética de Partículas no Plano e no Espaço
Sistema de Referência Móvel Rotacionando Z1 X Y Z O ZB ZA XA YA B trajetória rAB k1 i1 j1 Y1 YB A rOA i j k XB X1

13
Definição Etapa Inicial
ANÁLISE DINÂMICA DE CORTADOR DE BASE DE CANA, COM DOIS GRAUS DE LIBERDADE Etapa Inicial Dedução das Matrizes de Transformação de Coordenadas e de suas transpostas Definição Matrizes de Transformação de Coordenadas Tn (n : base), são matrizes dependentes do tempo, responsáveis por transformar a representação de um vetor descrito na base de referência BI, para uma base local Bn (B1, ... Bn) (frequentemente móvel). A transposta T’n , por sua vez, transforma um vetor descrito na base local Bn (B1, ... Bn), para a base de referência, podendo esta ser outra base local ou a base inercial.
, são. matrizes dependentes do tempo, responsáveis por transformar a. representação de um vetor descrito na base de referência BI, para. uma base local Bn (B1, ... Bn) (frequentemente móvel). A transposta T’n , por sua vez, transforma um vetor descrito na base. local Bn (B1, ... Bn), para a base de referência, podendo esta ser outra. base local ou a base inercial.")
14
Etapa Inicial Propriedades
ANÁLISE DINÂMICA DE CORTADOR DE BASE DE CANA, COM DOIS GRAUS DE LIBERDADE Etapa Inicial Dedução das Matrizes de Transformação de Coordenadas e de suas transpostas Propriedades Existem duas importantes propriedades que as matrizes de transformação de coordenadas guardam: seu determinante é sempre unitário e sua inversa é igual a sua transposta.

15
Cinemáica e Cinética de Partículas no Plano e no Espaço
Sistema de Referência Móvel Rotacionando X Y Z O Z1 k1 i1 j1 Y1 A i j k X1 Y Y1 X1 X

16
Cinemáica e Cinética de Partículas no Plano e no Espaço
Sistema de Referência Móvel Rotacionando Z1 X Y Z O ZB ZA XA YA B rAB k1 i1 j1 Y1 YB A rOA i j k XB X1 IrAB IrOB IrOA

17
Cinemáica e Cinética de Partículas no Plano e no Espaço
Sistema de Referência Móvel Rotacionando

18
Cinemáica e Cinética de Partículas no Plano e no Espaço
Sistema de Referência Móvel Rotacionando Componente da velocidade provocada pela rotação com módulo(rAB) = cte Variação no tempo do módulo( rAB ) Translação da origem “A” da base local
 = cte. Variação no tempo do módulo( rAB ) Translação da origem A da base local.")
19
Cinemáica e Cinética de Partículas no Plano e no Espaço
Sistema de Referência Móvel Rotacionando A velocidade do ponto “B” pode ser provocada por: X Y Z O B rAB a) Movimentação do ponto “A” , origem da base local A rOA b) Giro da base local i j k c) Variação do módulo( rAB ) a) b) c)
 Movimentação do ponto. A , origem da base local. A. rOA. b) Giro da base local i. j. k. c) Variação do módulo( rAB ) a) b) c)")
20
Componente da velocidade linear absoluta provocada pelo giro da peça (base)
")
21
Componente da velocidade linear absoluta provocada pelo giro da peça (base)
")
22
Componente da velocidade linear absoluta provocada pelo movimento relativo entre o ponto de interesse e a peça (base)
")
23
Velocidade linear absoluta do ponto B com suas três componentes

24
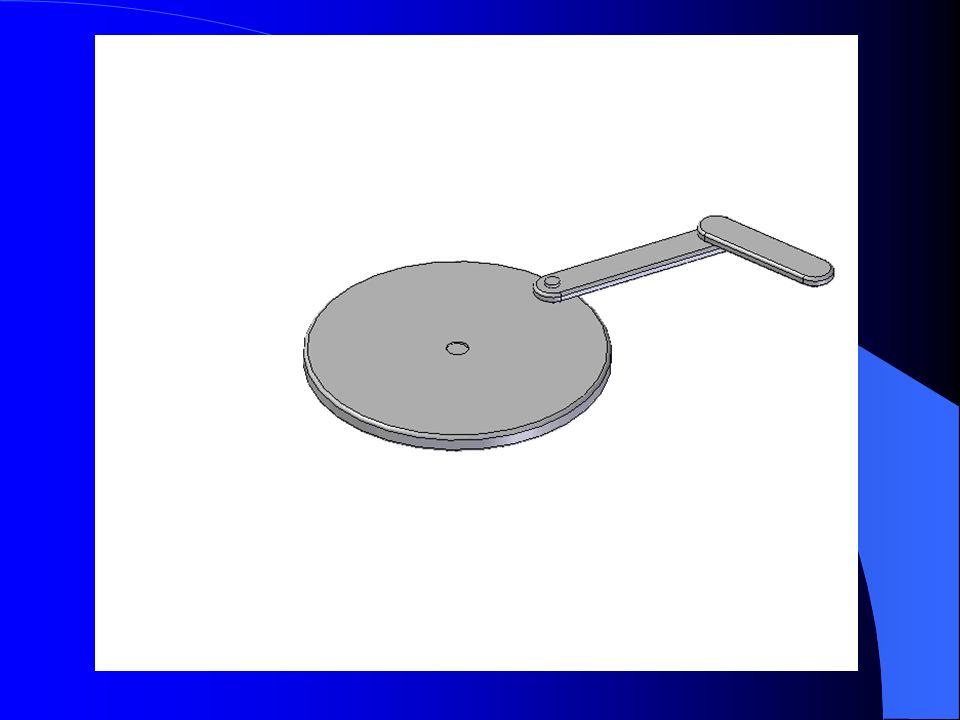
Problema: Considerando que o disco da figura gira com velocidade de rotação de 1000 rpm e que a faca gira sobre a articulação “b” com velocidade angular de 200 s-1, calcular a velocidade linear absoluta do ponto “c” quando o conjunto ceifador se desloca à direita com velocidade de translação de 2 m s-1. ab = 600 mm ; bc = 150 mm.

26
Tarefa: Considerando que o disco da figura gira com velocidade de rotação de 1000 rpm, o braço intermediário gira em torno da articulação A com velocidade angular de s-1 e que a faca gira sobre a articulação “B” com velocidade angular de 200 s-1, calcular a velocidade linear absoluta do ponto “c” para um mecanismo com as seguintes dimensões. OA = 400 mm ; AB = 300 mm. BC = 200 mm

27
Cinemáica e Cinética de Partículas no Plano e no Espaço
Vetor aceleração absoluta O vetor aceleração absoluta da partícula B, corresponde à derivada segunda no tempo do vetor posição IrOB, no sistema de referência inercial. Vetor aceleração absoluta que descreve a aceleração da trajetória descrita pela partícula B, no sistema inercial.








 se propagam>")



 Único arquivo.>")






>")
>")
