Carregar apresentação
A apresentação está carregando. Por favor, espere

1
Geometria no Espaço II (11º ano)
")
2
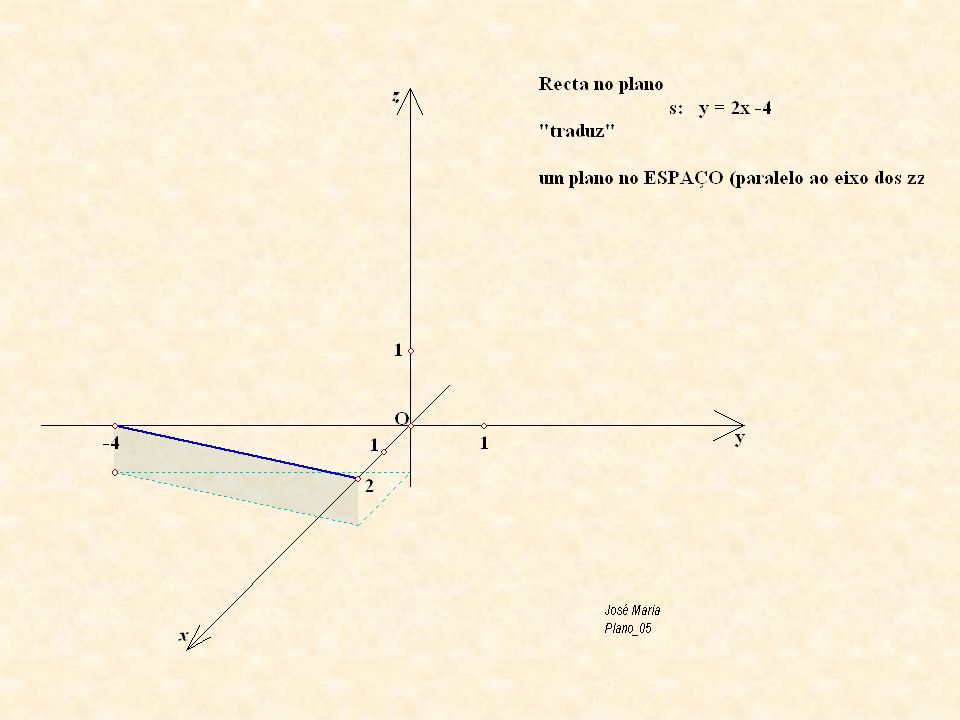
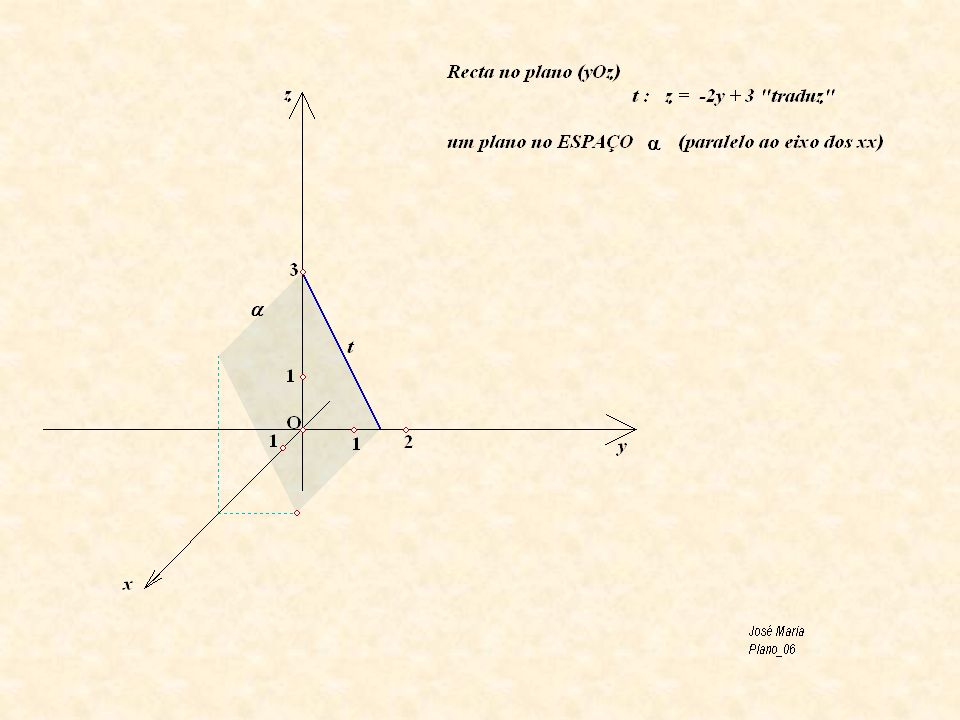
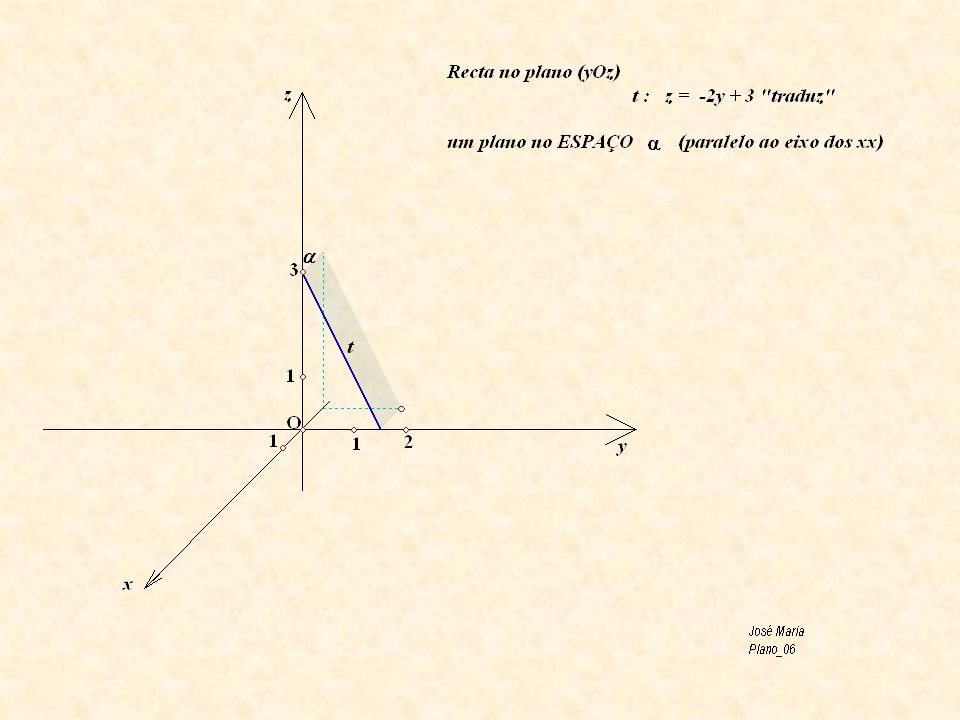
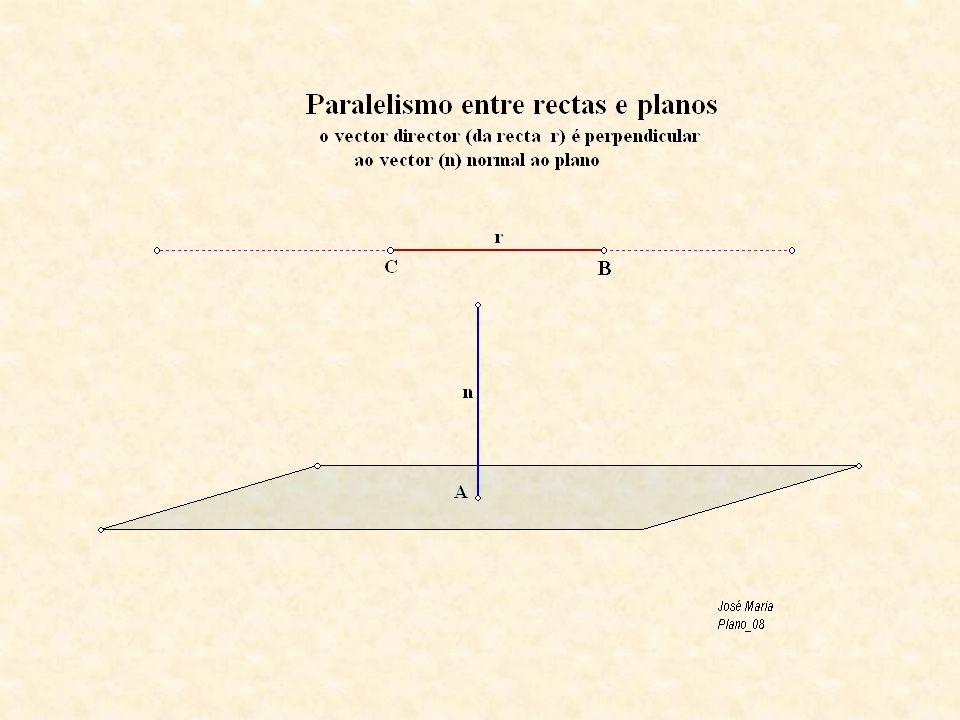
Modos de definir um plano
Um plano fica definido por: Um vector normal ao plano n (n1, n2, n3) e Um ponto do plano dado A (a1, a2, a3) Sendo P (x, y, z) um ponto qualquer do plano
 e. Um ponto do plano dado A (a1, a2, a3) Sendo P (x, y, z) um ponto qualquer do plano.")
3
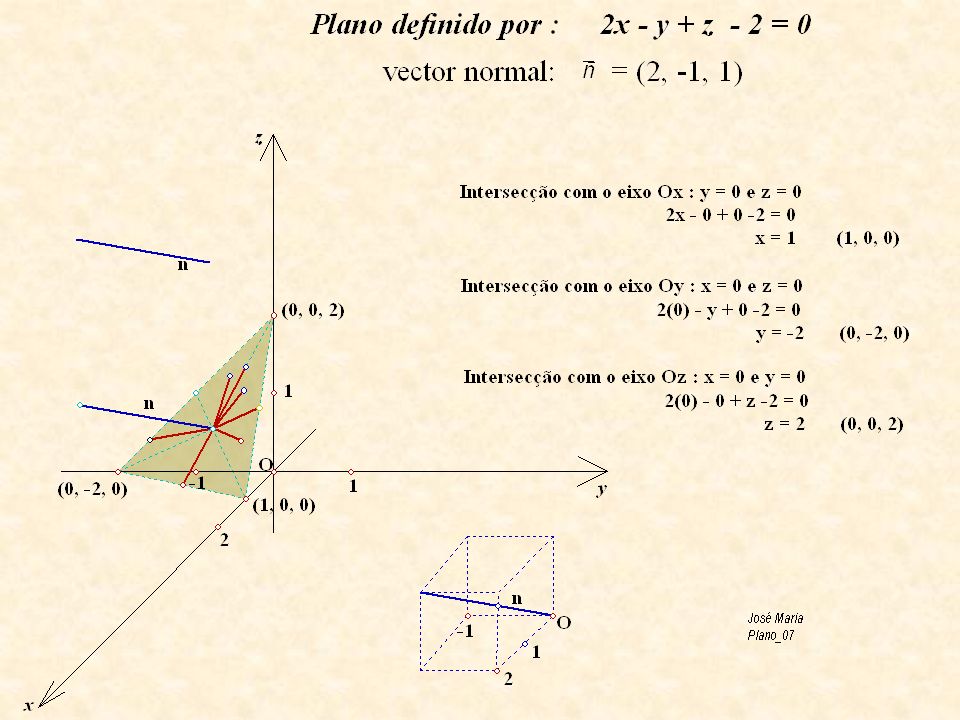
Equação do plano n1x + n2y + n3z + d = 0
Sendo o vector normal ao plano: n = (n1, n2, n3)
")
4
Equação do plano Resultante de: = 0 n1(x-a1)+ n2(y-a2)+ n3(z-a3) = 0
(vectores perpendiculares, produto escalar nulo) n1(x-a1)+ n2(y-a2)+ n3(z-a3) = 0 n1x - n1a1 + n2y - n2a2 + n3z -n3a2= 0 n1x + n2y + n3z + (- n1a1 - n2a2 -n3a3 ) = 0 d (- n1a1 - n2a2 -n3a3 )
 n1(x-a1)+ n2(y-a2)+ n3(z-a3) = 0. n1x - n1a1 + n2y - n2a2 + n3z -n3a2= 0. n1x + n2y + n3z + (- n1a1 - n2a2 -n3a3 ) = 0. d. (- n1a1 - n2a2 -n3a3 )")
19
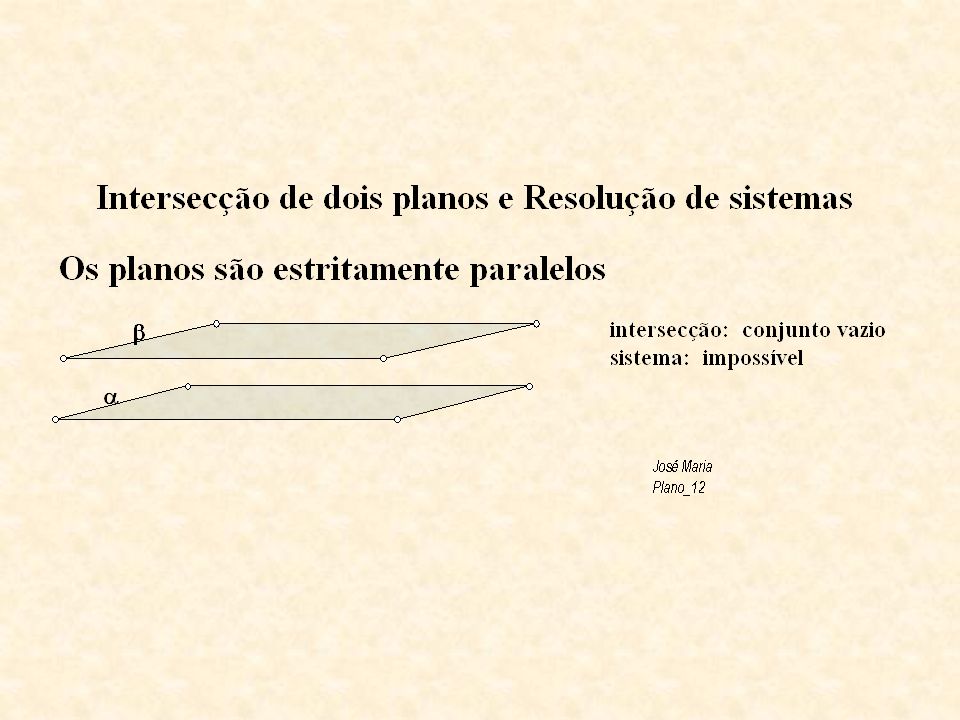
Intersecções de 2 planos / Posição relativa de 2 planos
Sistema impossível: 2 planos estritamente paralelos 2 vectores colineares 2 equações não equivalentes entre si

20
Intersecções de 2 planos / Posição relativa de 2 planos
Sistema impossível: (2 planos estritamente paralelos) vectores normais e
 vectores normais e.")
22
Intersecções de 2 planos / Posição relativa de 2 planos
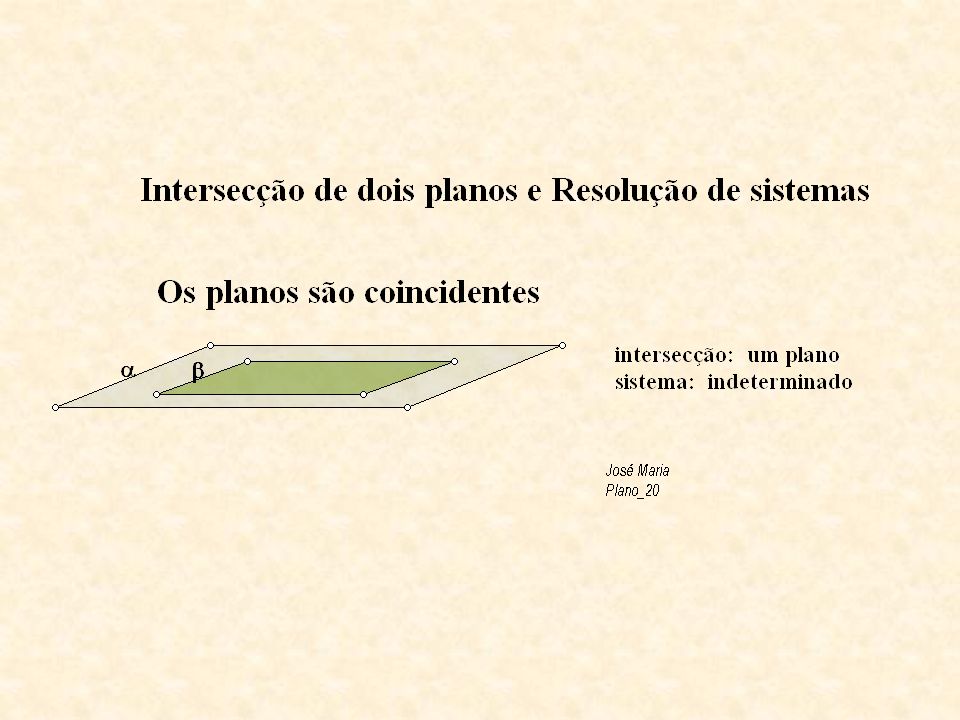
Sistema possível e indeterminado: 2 planos paralelos coincidentes 2 vectores colineares 2 equações equivalentes entre si

23
Intersecções de 2 planos / Posição relativa de 2 planos
Sistema indeterminado: (2 planos paralelos coincidentes) vectores normais e
 vectores normais e.")
27
Intersecções de 2 planos / Posição relativa de 2 planos
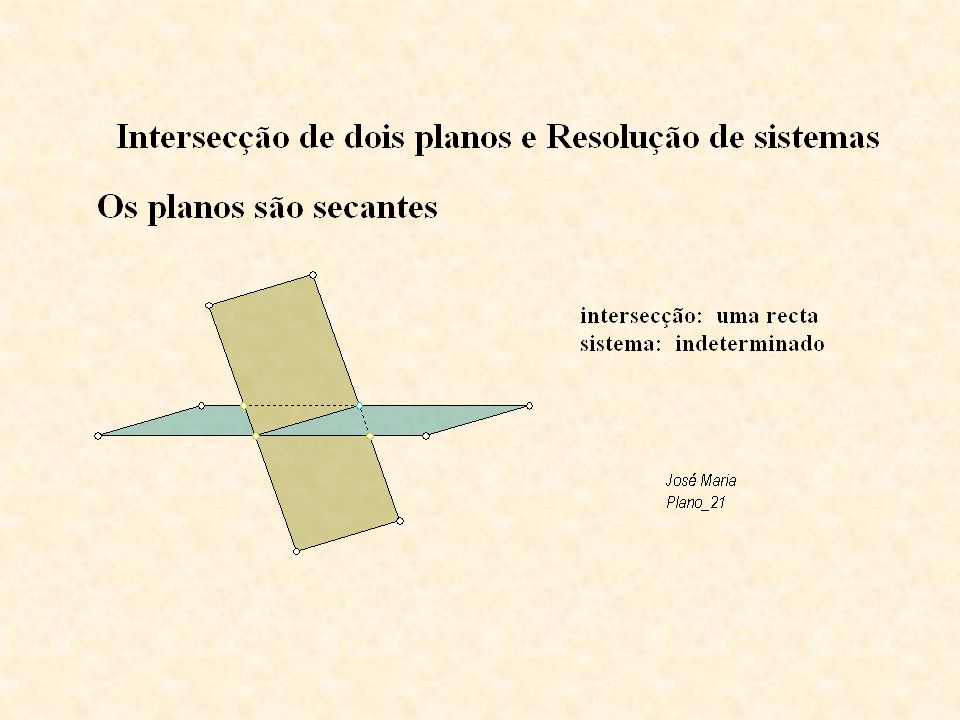
Sistema indeterminado: (2 planos intersectam-se numa recta) vectores normais e OBS: Neste caso é necessário determinar a equação da recta de intersecção
 vectores normais e. OBS: Neste caso é necessário determinar a equação da recta de intersecção.")
28
Ver resolução de sistema em ficheiro Acrobat Reader “Posição relativa de 2 planos.pdf ”

30
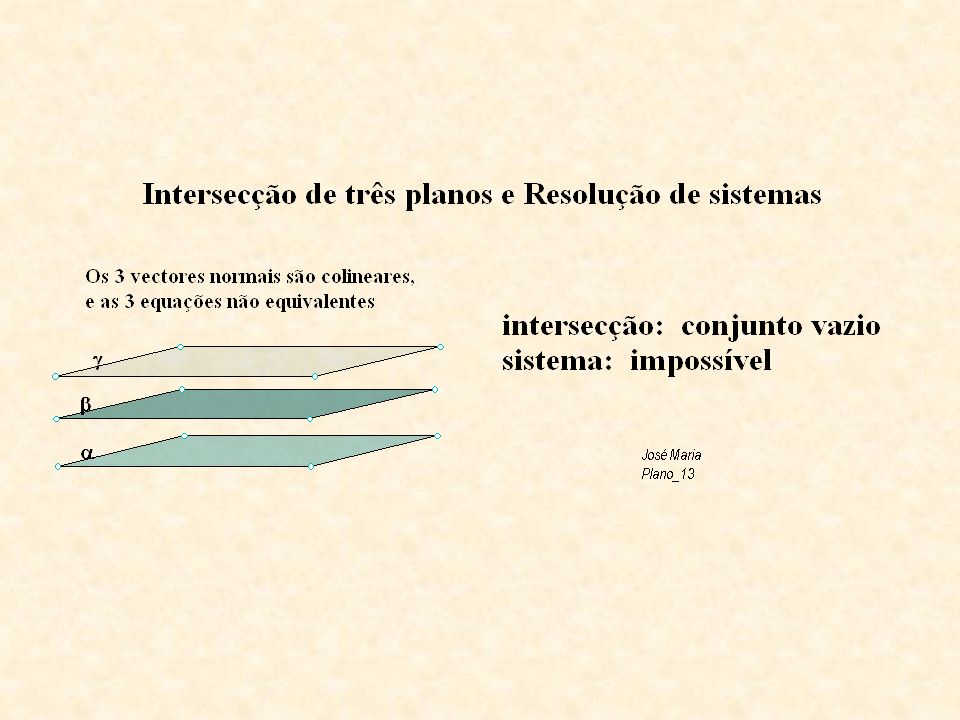
Intersecções de 3 planos / Posição relativa de 3 planos
Sistema impossível 3 planos estritamente paralelos 3 vectores normais colineares 3 equações não equivalentes entre si

32
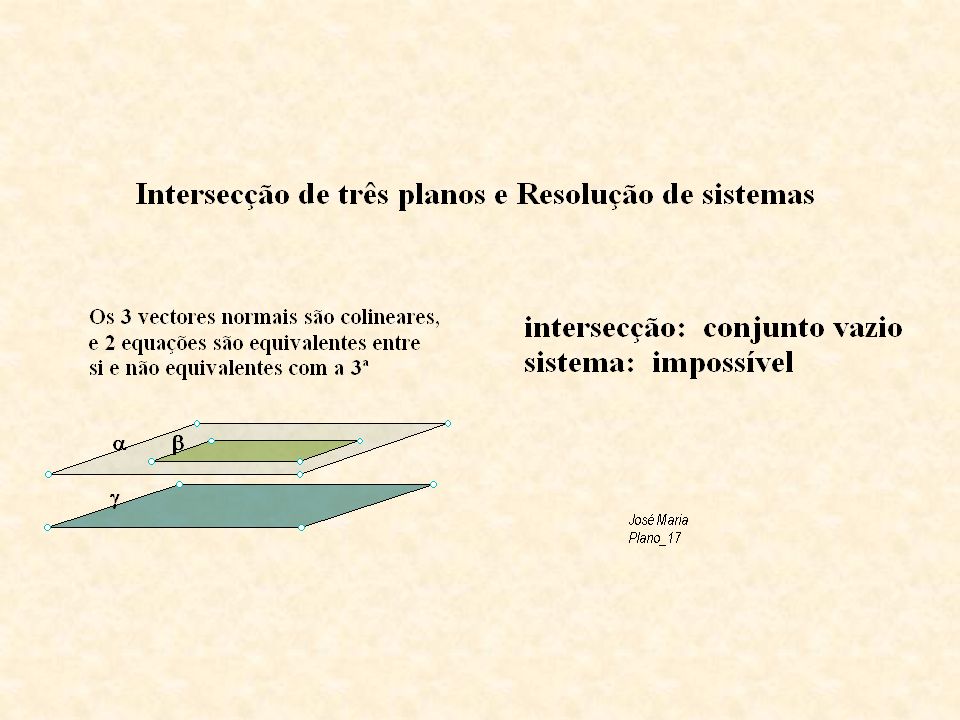
Intersecções de 3 planos / Posição relativa de 3 planos
Sistema impossível 2 planos coincidentes e paralelos ao terceiro 3 vectores normais colineares só 2 equações equivalentes

34
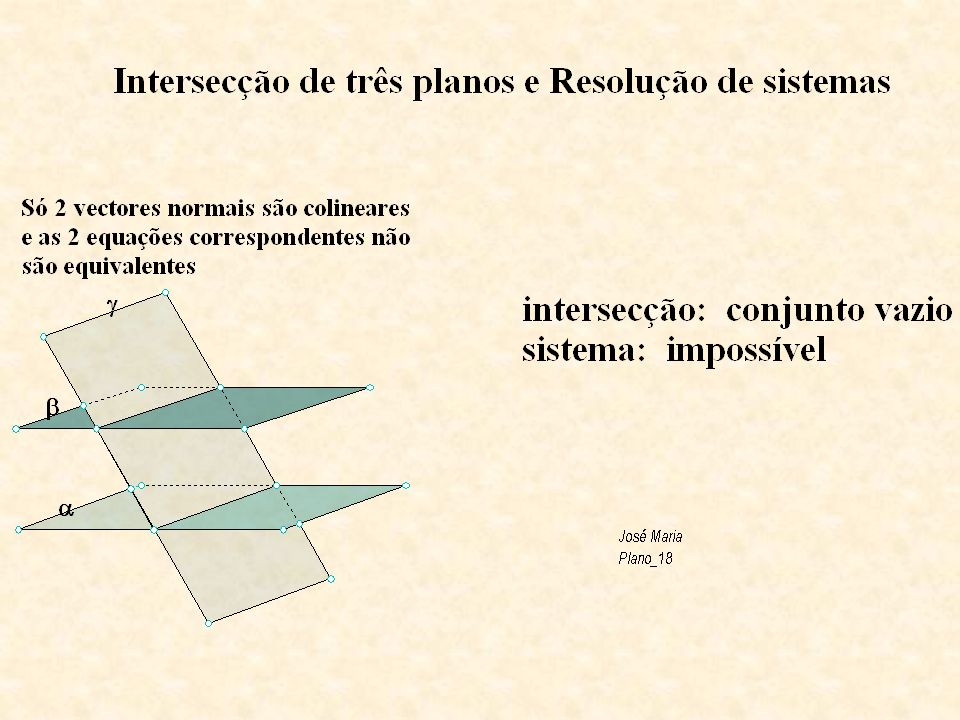
Intersecções de 3 planos / Posição relativa de 3 planos
Sistema impossível 2 planos estritamente paralelos e o terceiro secante aos dois só 2 vectores normais colineares e as 2 equações não equivalentes

36
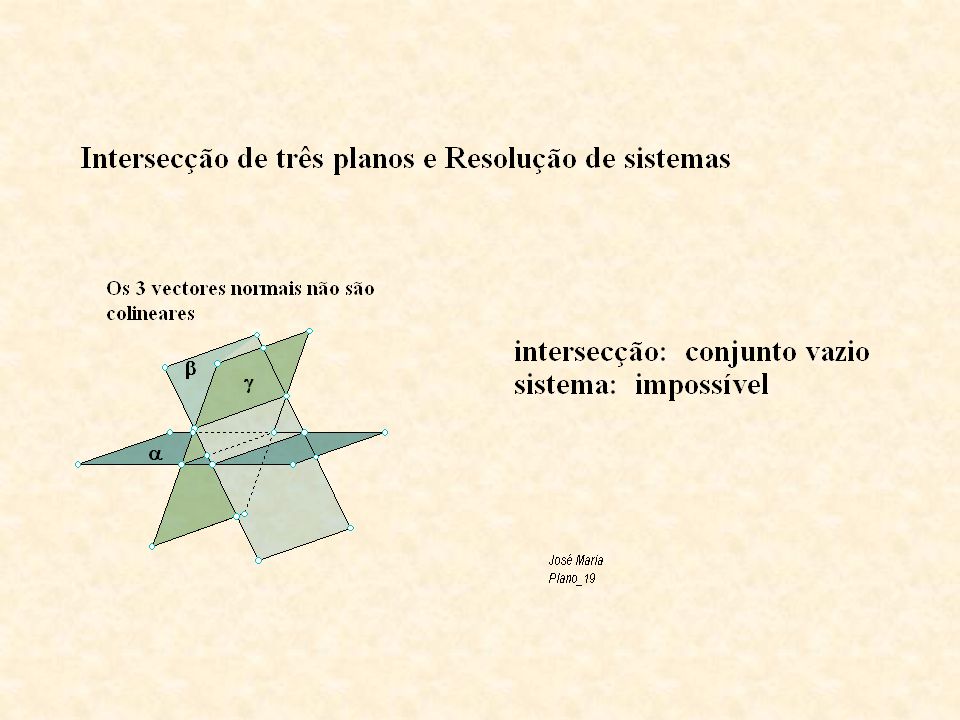
Intersecções de 3 planos / Posição relativa de 3 planos
Sistema impossível nenhum plano paralelo nem coincidente nenhum vector normal colinear entre si

38
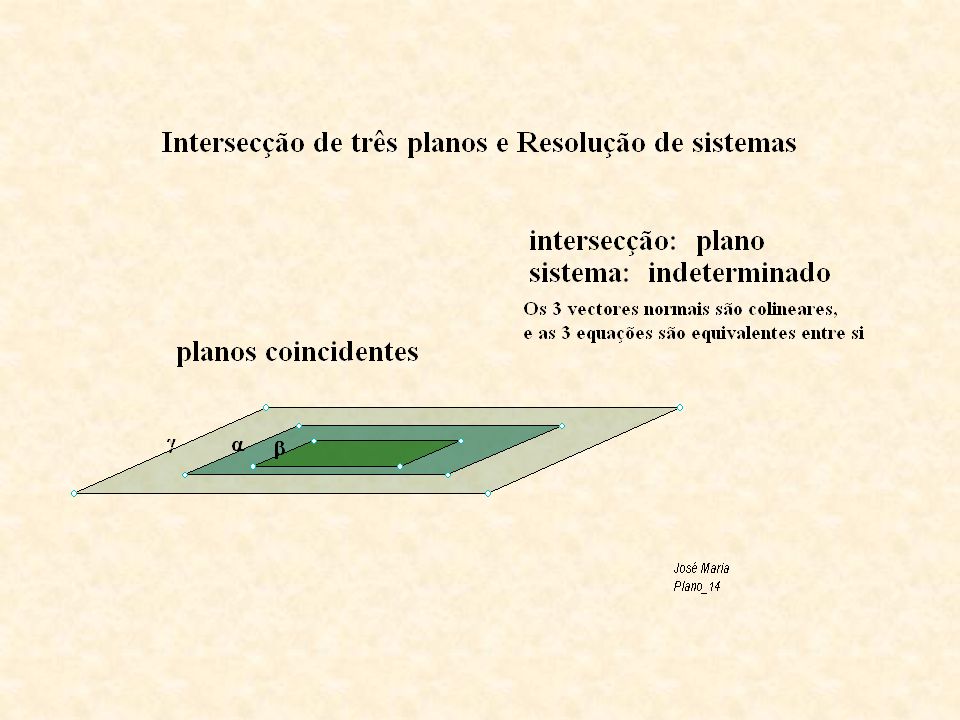
Intersecções de 3 planos / Posição relativa de 3 planos
Sistema possível e indeterminado 3 planos coincidentes 3 vectores normais colineares 3 equações equivalentes

40
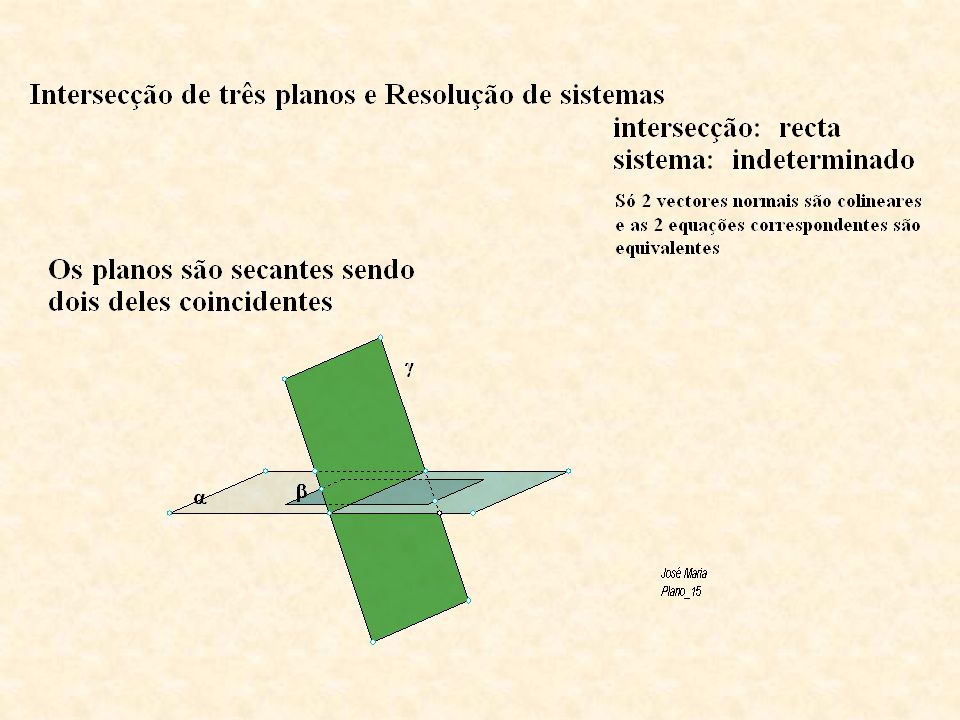
Intersecções de 3 planos / Posição relativa de 3 planos
Sistema possível e indeterminado: 2 planos coincidentes e 1 secante aos dois só 2 vectores colineares só 2 equações equivalentes

42
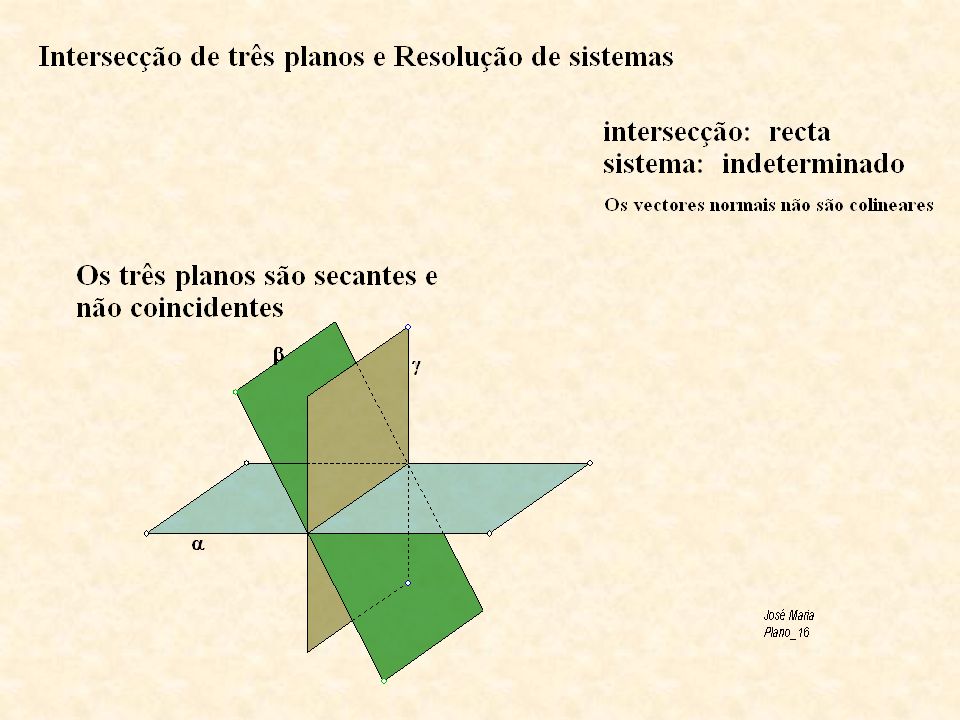
3 planos secantes segundo a mesma recta não há vectores colineares
Intersecções de 3 planos / Posição relativa de 3 planos Sistema possível e indeterminado: 3 planos secantes segundo a mesma recta não há vectores colineares nem equações equivalentes

45
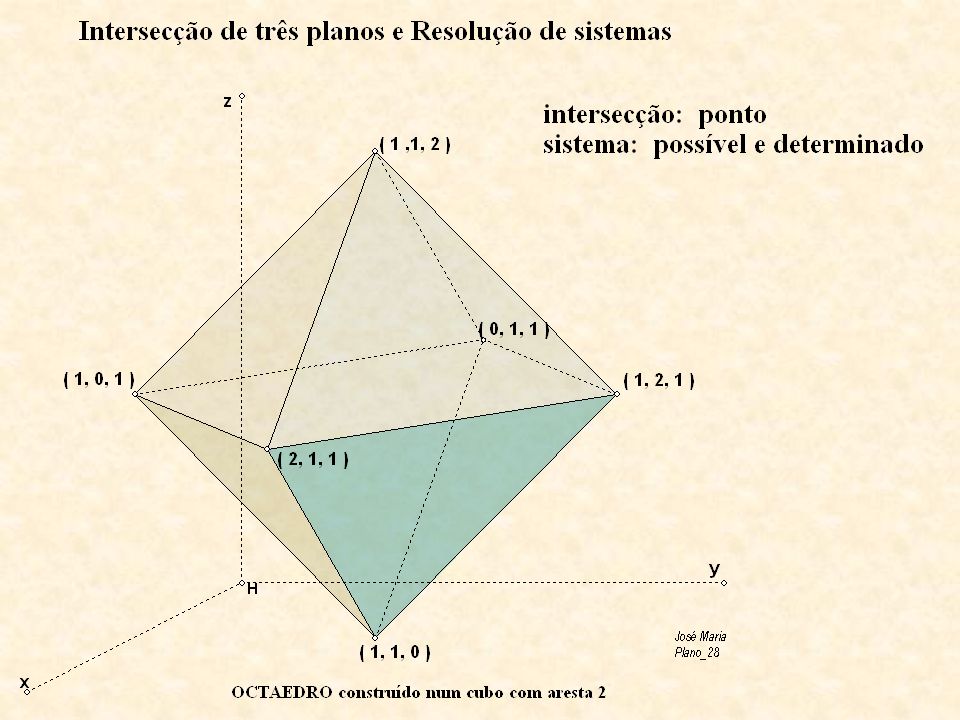
Intersecções de 3 planos / Posição relativa de 3 planos
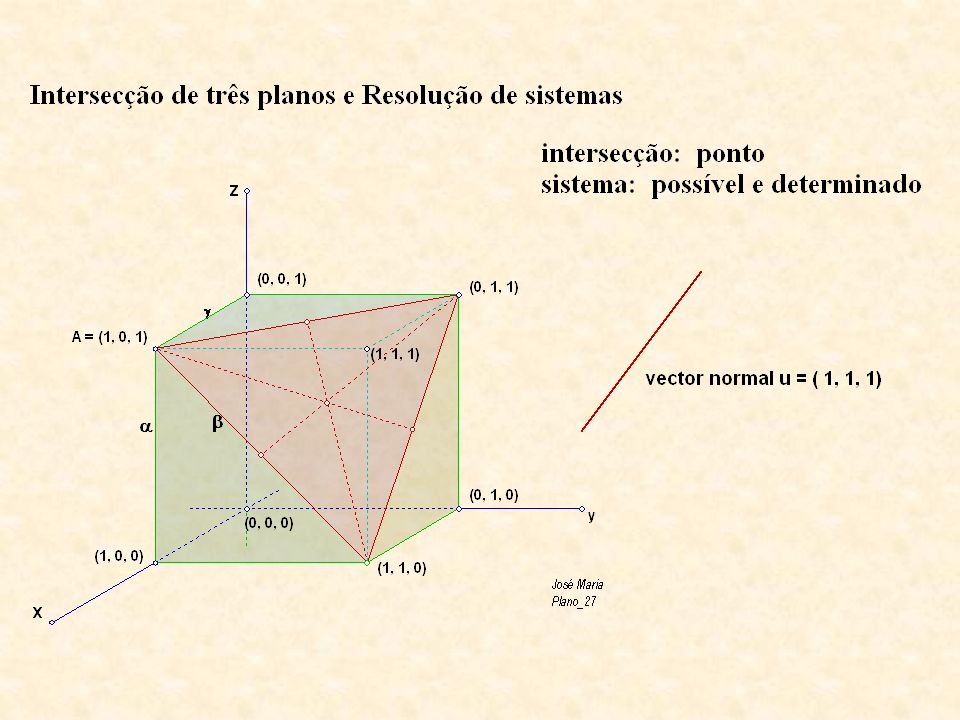
Sistema possível e determinado: 3 planos secantes (intersectam-se num ponto) nenhum vector colinear nenhuma equação equivalente
 nenhum vector colinear. nenhuma equação equivalente.")
46
Ver resolução dum sistema em ficheiro Word “Posição relativa de 3 planos.pdf”

Apresentações semelhantes












>")




>")



