Carregar apresentação
A apresentação está carregando. Por favor, espere

1
Visão Computacional Formação da Imagem www.dca.ufrn.br/~lmarcos/courses/visao

2
Sumário Princípios óticos e geométricos na formação de imagens de intensidade Natureza de imagens de intensidade, aquisição e modelos matemáticos

3
Mais sobre visão

4
Variantes

5
Mais variantes

6
Iluminação Fontes de luz emitem luz: –Espectro eletro-magnético –Posição e direção Superfícies refletem luz –Reflectância –Geometria (posição, orientação, micro-estrutura) –Absorção –Transmissão –Iluminação é determinada pela interação entre fontes de luzes e superfícies
 –Absorção –Transmissão –Iluminação é determinada pela interação entre fontes de luzes e superfícies")
7
Significado de cor O que é uma imagem? –Irradiância: cada pixel mede a luz incidente num ponto no filme –Proporcional à integral da radiância da cena que chega àquele ponto O que é cor? –Refere-se à radiancia ou irradiância medida em 3 comprimentos de onda diferentes –Cor da cena: radiância vinda das superfícies (para iluminação) –Cor da imagem: irradiância, para renderização –Quantidades com diferentes unidades, não devem ser confundidas
 –Cor da imagem: irradiância, para renderização –Quantidades com diferentes unidades, não devem ser confundidas.")
8
Percepção de iluminação A luz recebida de um objeto pode ser expressa por I( ) = ( )L( ) onde ( ) representa a reflectividade ou transmissividade do objeto (albedo) e L( ) é a distribuição de energia incidente. Intervalo de iluminação do sistema visual humano: 1 a 10 10

9
Luminância de um objeto A luminância ou intensidade de luz de um objeto espacialmente distribuído, com distribuição de luz I(x, y, ), é definida como: V( ) é a função de eficiência luminosa relativa do sistema visual.
, é definida como: V( ) é a função de eficiência luminosa relativa do sistema visual.")
10
Luminância e brilho Luminância de um objeto é independente da luminância dos objetos ao seu redor. Brilho de um objeto também chamado de brilho aparente, é a luminância percebida e depende da luminância ao redor do objeto. Duas regiões com mesma luminância, cujas regiões ao redor de ambas possuem diferentes luminâncias terão diferentes brilhos aparentes.

12
Tipos de imagens Imagens de intensidade –Similar a fotografias –Codifica intensidade, cor –Adquiridas por câmeras Imagens de profundidade (range images) –Codifica forma e distância –Adquiridas por sensores especiais (sonar, câmeras laser)
 –Codifica forma e distância –Adquiridas por sensores especiais (sonar, câmeras laser)")
13
Características comuns Geralmente, matriz 2D de valores (números) Conseqüências: –Relação exata da imagem com a cena (física) é determinada pelo processo de aquisição que depende em última análise do sensor usado –Qualquer informação contida nas imagens pode ser ultimamente extraída (calculada) a partir de uma matriz 2D na qual está codificada
 Conseqüências: –Relação exata da imagem com a cena (física) é determinada pelo processo de aquisição que depende em última análise do sensor usado –Qualquer informação contida nas imagens pode ser ultimamente extraída (calculada) a partir de uma matriz 2D na qual está codificada")
14
Parâmetros físicos No sistema visual humano, o processo de formação de imagem começa com os raios de luz vindos da cena projetando nos foto- receptores da retina Uma variedade de parâmetros físicos afetam a formação das imagens num sistema artificial

15
Parâmetros óticos Caracterizam a ótica do sistema –tipo de lentes; –distância focal; –campo de vista; –abertura angular.

16
Parâmetros fotométricos Caracterizam o modelo da luz que chega ao sensor após reflexão nos objetos da cena –tipo, intensidade e direção de iluminação –propriedades de reflectância das superfícies visualizadas –efeitos da estrutura do sensor na quantidade de luz chegando aos fotoreceptores

17
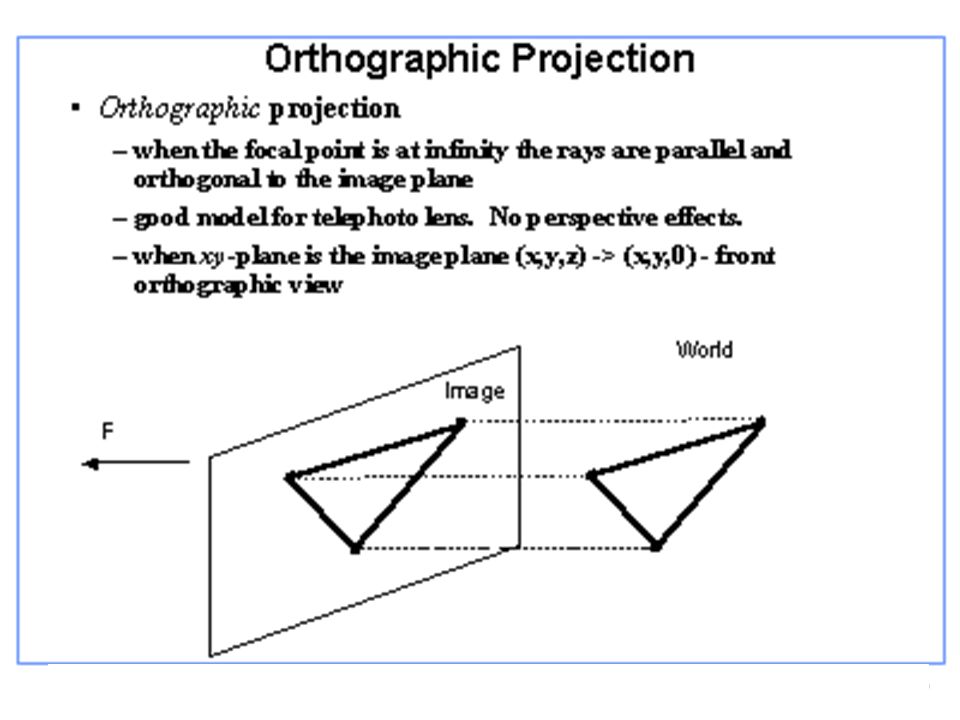
Parâmetros geométricos Posição na imagem na qual um ponto 3D é projetado –tipos de projeção –posição e orientação da câmera no espaço –distorções de perspectiva introduzidas no processo de imageamento

18
Outros parâmetros Propriedades físicas da matriz fotosensitiva da câmera Natureza discreta dos fotoreceptores Quantização da escala de intensidade

19
Ótica básica Formação da imagem em VC começa com o raio de luz que entra na câmera através da abertura angular (pupila num humano) Raio bate numa tela ou plano de imagem e o sensor fotoreceptivo registra intensidade da luz Muitos raios vem de luz refletida e alguns de luz direta
 Raio bate numa tela ou plano de imagem e o sensor fotoreceptivo registra intensidade da luz Muitos raios vem de luz refletida e alguns de luz direta")
20
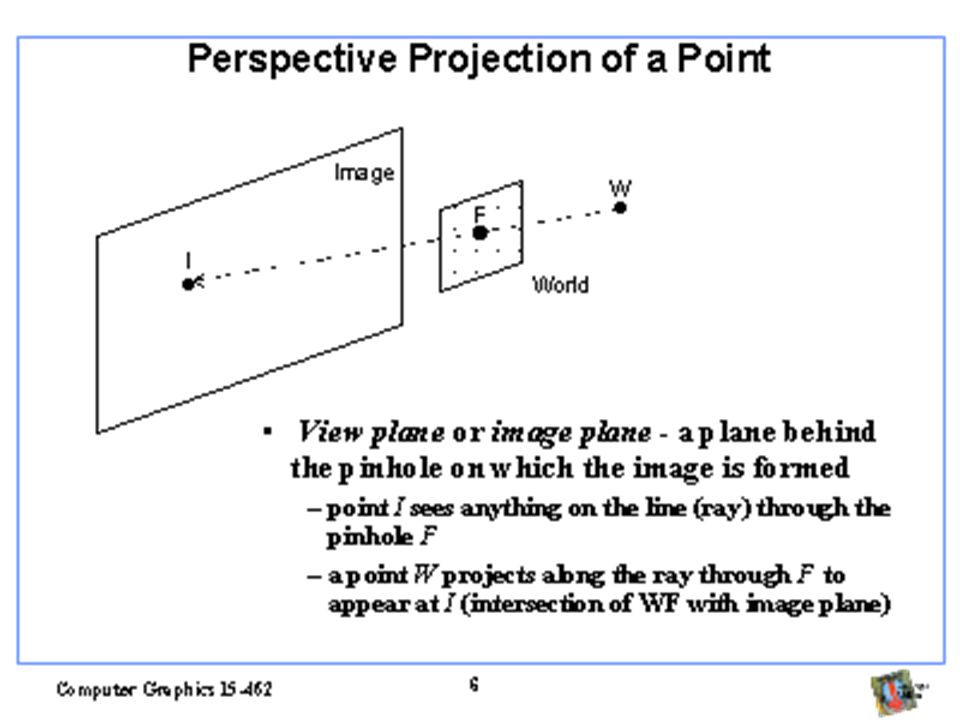
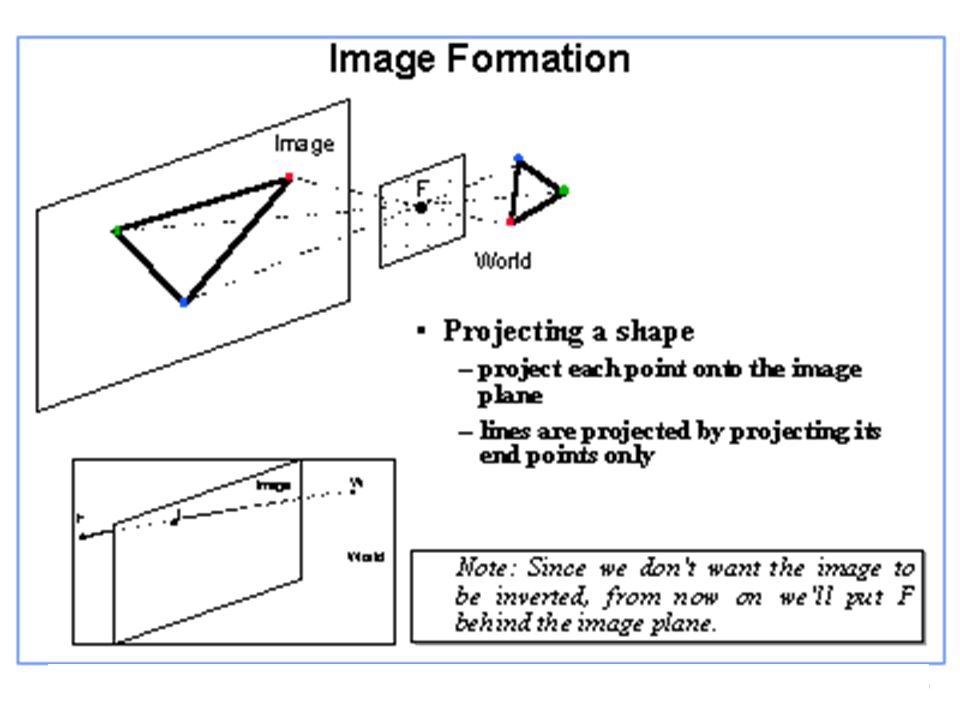
Focando uma imagem Qualquer ponto numa cena pode refletir raios vindos de várias direções Muitos raios vindos do mesmo ponto podem entrar na câmera. Para termos imagens nítidas, todos os raios vindos de um mesmo ponto P da cena devem convergir para um ponto único p no plano de imagem.

21
Reduzindo abertura Apenas um raio de cada ponto entra na câmera Imagens nítidas, sem distorções, mesmo à distâncias diferentes

24
Problemas com pin-hole Tempo de exposição longo Quantidade mínima de luz Difração

25
Introduzindo um sistema ótico Introduz lentes e abertura Introduz outros elementos para que um raio vindo do mesmo ponto 3D convirja para um único ponto na imagem Mesma imagem que uma pin-hole mas com tempo de exposição bem menor e abertura maior

26
Lentes finas FlFl FrFr Lente fina Eixo ótico ff

27
Duas restrições básicas 1) Qualquer raio que entra no sistema de lentes paralelo ao eixo ótico, sai na direção do foco no outro lado 2) Qualquer raio que entra na lente vindo da direção do foco, sai paralelo ao eixo ótico do outro lado
 Qualquer raio que entra no sistema de lentes paralelo ao eixo ótico, sai na direção do foco no outro lado 2) Qualquer raio que entra na lente vindo da direção do foco, sai paralelo ao eixo ótico do outro lado")
28
Lentes finas FlFl FrFr Lente fina Eixo ótico ffZz P Q R O S p s

29
Modelo básico Propriedade 1) a PQ e propriedade 2) a PR Defletem para se encontrar em algum ponto do outro lado Uma vez que o modelo de lente fina foca todos os raios vindos de P convergem para o mesmo ponto, PQ e PR se intersectam em p
 a PQ e propriedade 2) a PR Defletem para se encontrar em algum ponto do outro lado Uma vez que o modelo de lente fina foca todos os raios vindos de P convergem para o mesmo ponto, PQ e PR se intersectam em p")
30
Equação fundamental Usando similaridade entre os pares de triângulo (, ) e (, ), obtém-se: Zz = f 2 Fazendo Z´=Z+f e z´= z+f, encontramos: 1 /Z´ + 1/z´ = 1/f
 e (, ), obtém-se: Zz = f 2 Fazendo Z´=Z+f e z´= z+f, encontramos: 1 /Z´ + 1/z´ = 1/f")
31
Campo de vista Seja d o diâmetro efetivo das lentes (periferia pode não ser visível) Juntamente com f, determinam o campo de vista: tan w = d/(2f) metade do ângulo subentendido pelo diâmetro, visto a partir do foco
 Juntamente com f, determinam o campo de vista: tan w = d/(2f) metade do ângulo subentendido pelo diâmetro, visto a partir do foco")
Apresentações semelhantes




















 Beatriz Ramos (IF/UFRJ) Ricardo.>")
>")