Carregar apresentação
1
Alocação de pólos e “model matching” (C. T. Chen, Capítulo 9)
Sistemas Lineares

2
Estuda-se aqui o projeto de controladores (ou compensadores) de ordem mínima para fazer alocação de pólos e model matching A solução é apresentada na forma de solução de equações lineares
 de ordem mínima para fazer alocação de pólos e model matching A solução é apresentada na forma de solução de equações lineares")
3
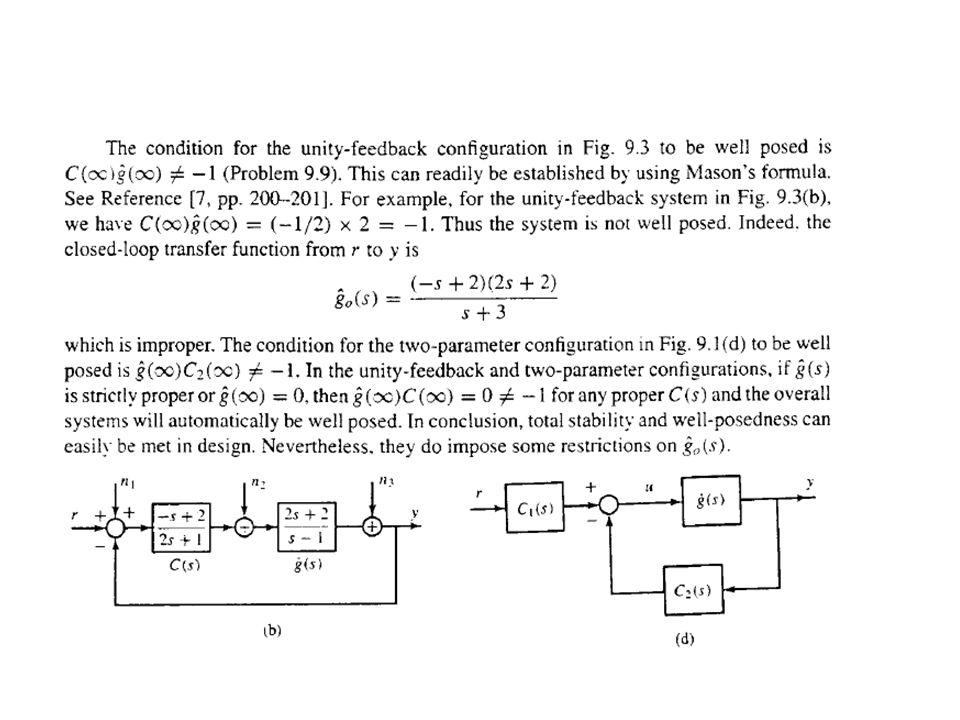
Configurações de controle
Malha aberta Realimentação unitária Configuração estimador-controlador Configuração de dois parâmetros

5
As plantas estudadas neste capítulo serão limitadas àquelas que podem ser descritas por funções ou matrizes racionais próprias. Por conveniência, vamos introduzir a seguinte terminologia, que persistirá ao longo do capítulo: é assumida ser uma fração coprima daí, cada raiz de D(s) é um pólo e cada raiz de N(s) é um zero um pólo é dito estável se sua parte real é negativa, e é dito instável se sua parte real é zero ou positiva zeros de fase mínima têm a parte real negativa zeros de fase não mínima têm parte real nula ou positiva Um polinômio é dito ser um polinômio Hurwitz se todas as suas raízes têm parte real negativa Obs.: Não se fala em zeros estáveis ou instáveis, embora algumas literaturas o façam.
 é um pólo e cada raiz de N(s) é um zero. um pólo é dito estável se sua parte real é negativa, e é dito instável se sua parte real é zero ou positiva. zeros de fase mínima têm a parte real negativa. zeros de fase não mínima têm parte real nula ou positiva. Um polinômio é dito ser um polinômio Hurwitz se todas as suas raízes têm parte real negativa. Obs.: Não se fala em zeros estáveis ou instáveis, embora algumas literaturas o façam.")
6
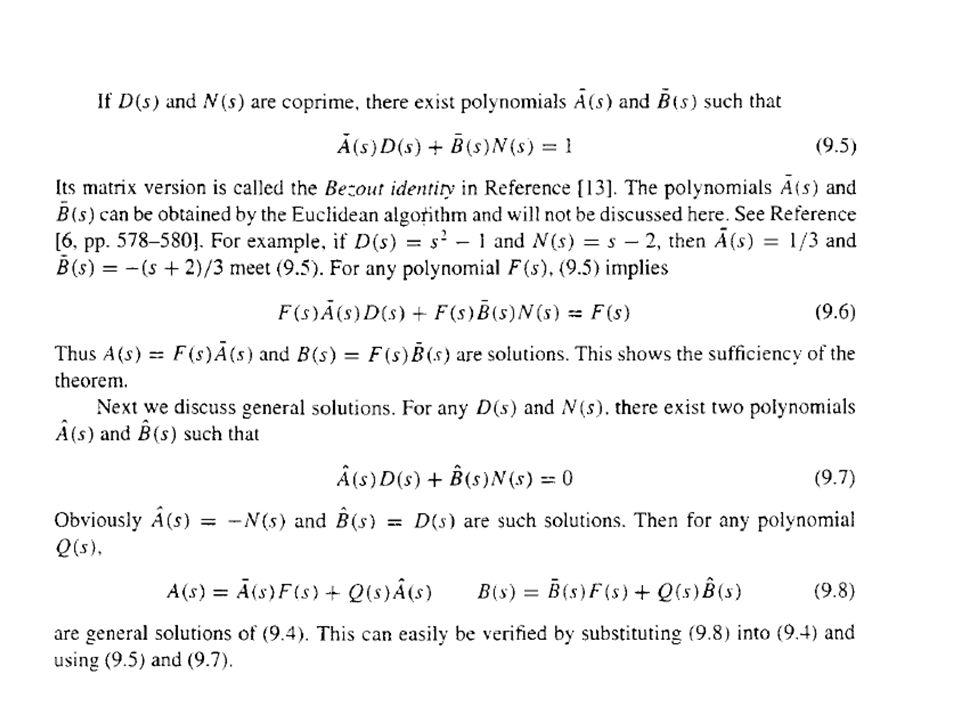
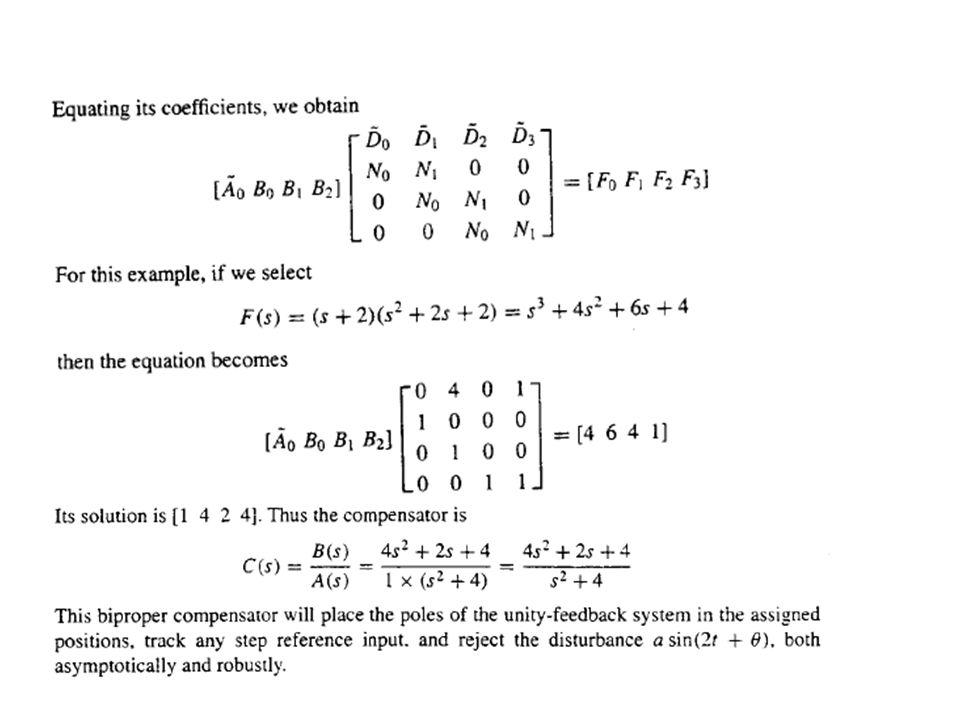
Equação do compensador – método clássico

11
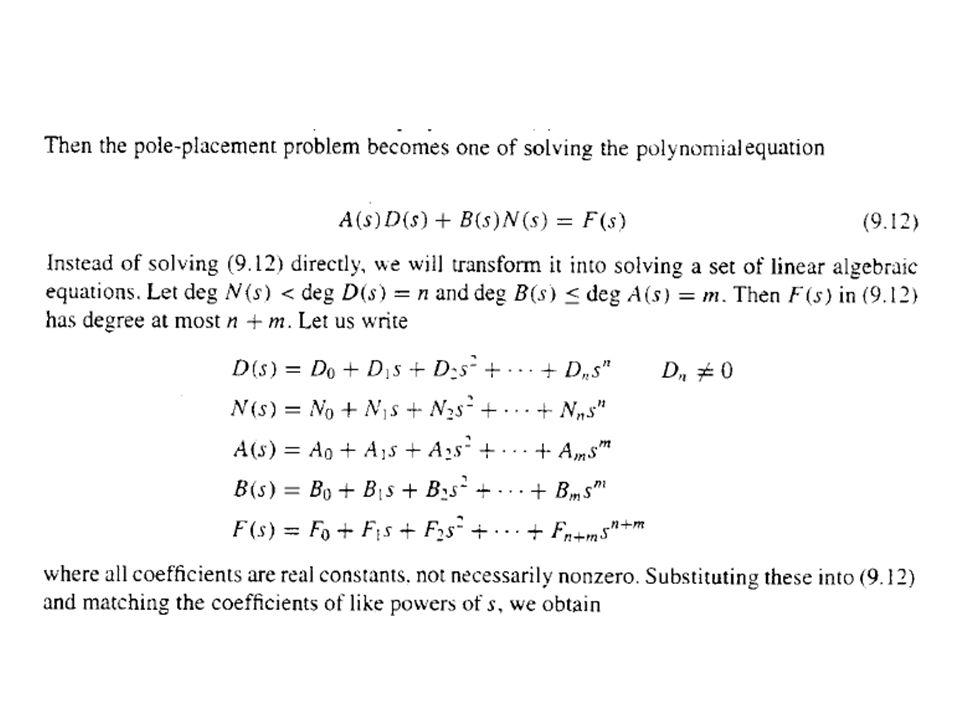
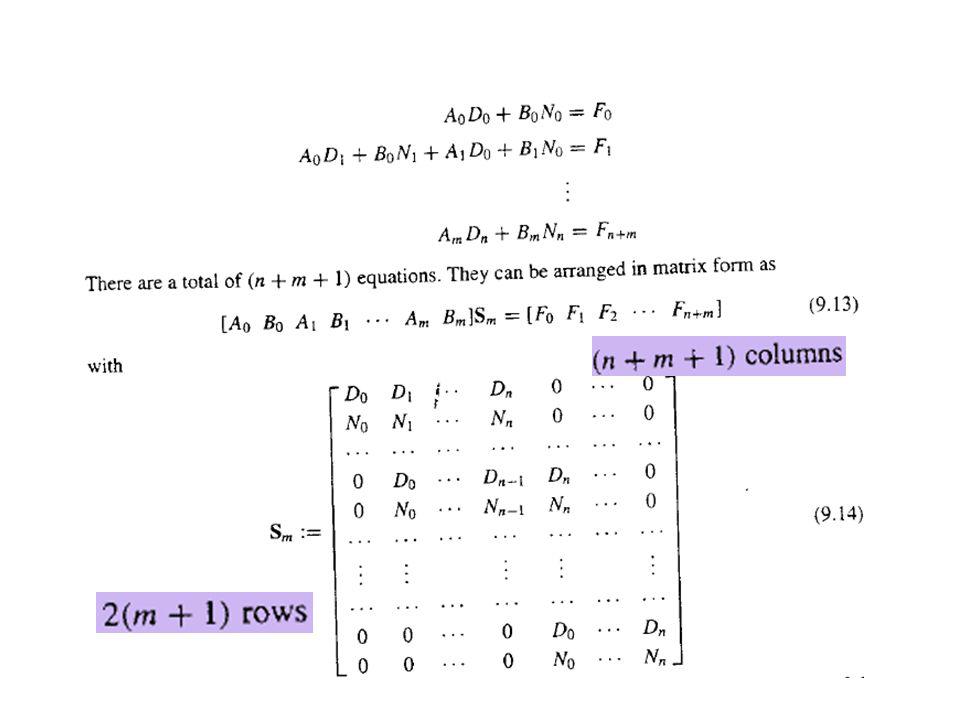
Realimentação unitária – alocação de pólos

15
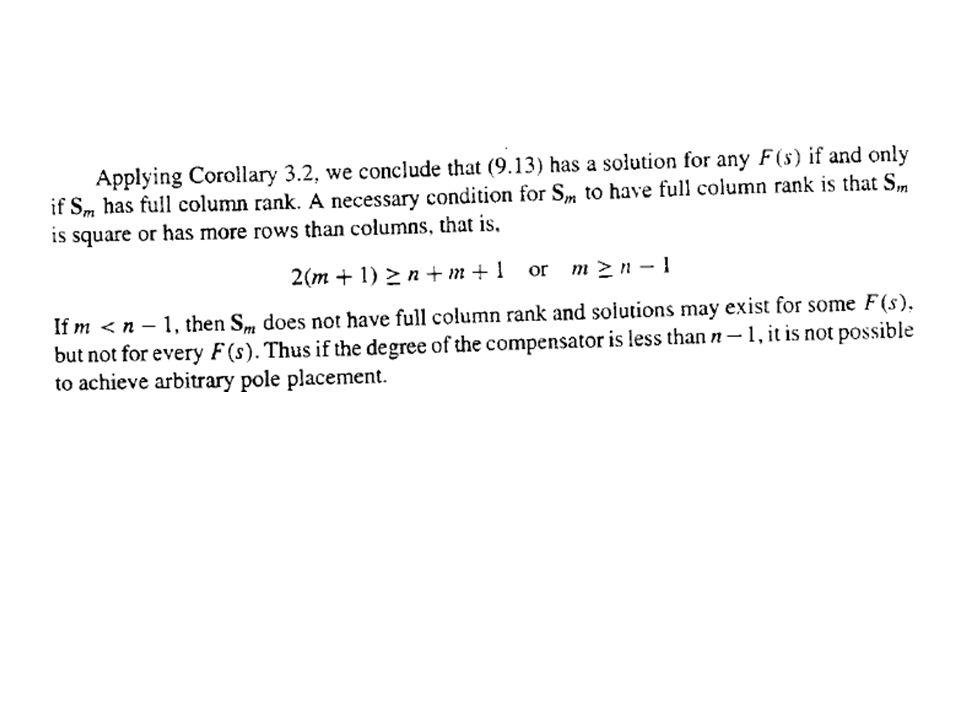
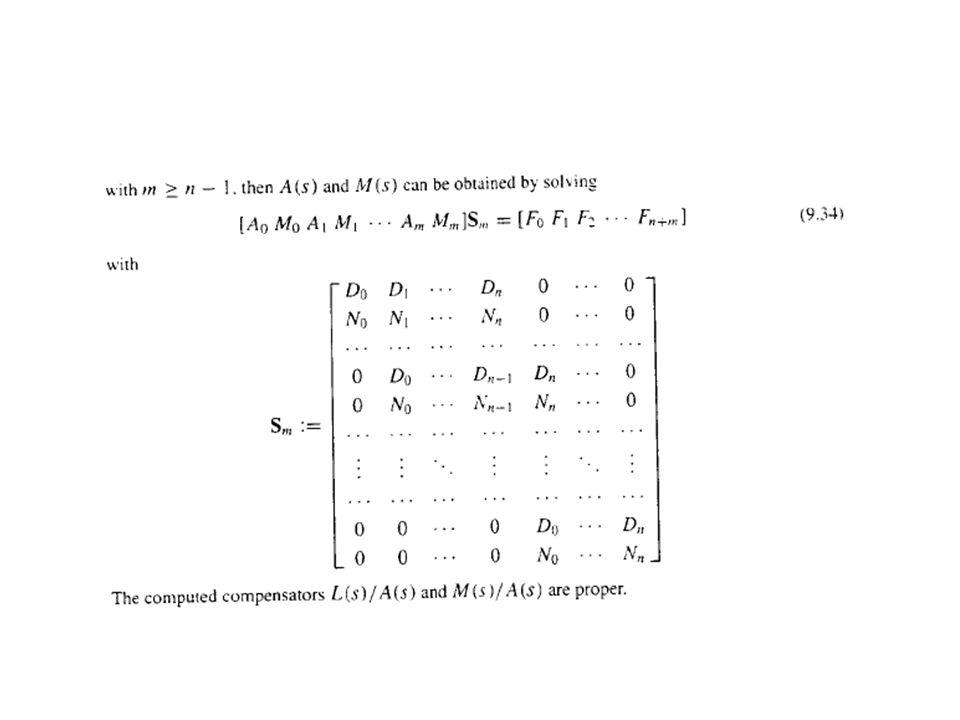
A equação tem solução para qualquer F se e somente se a matriz Sm tem posto completo

17
n – grau de m – grau de

20
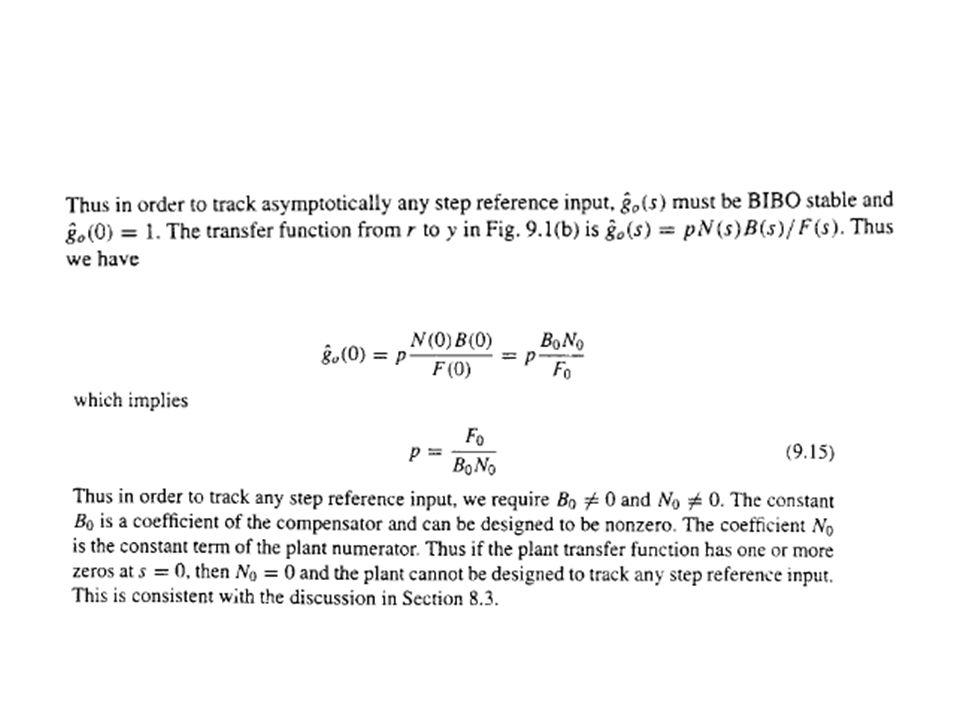
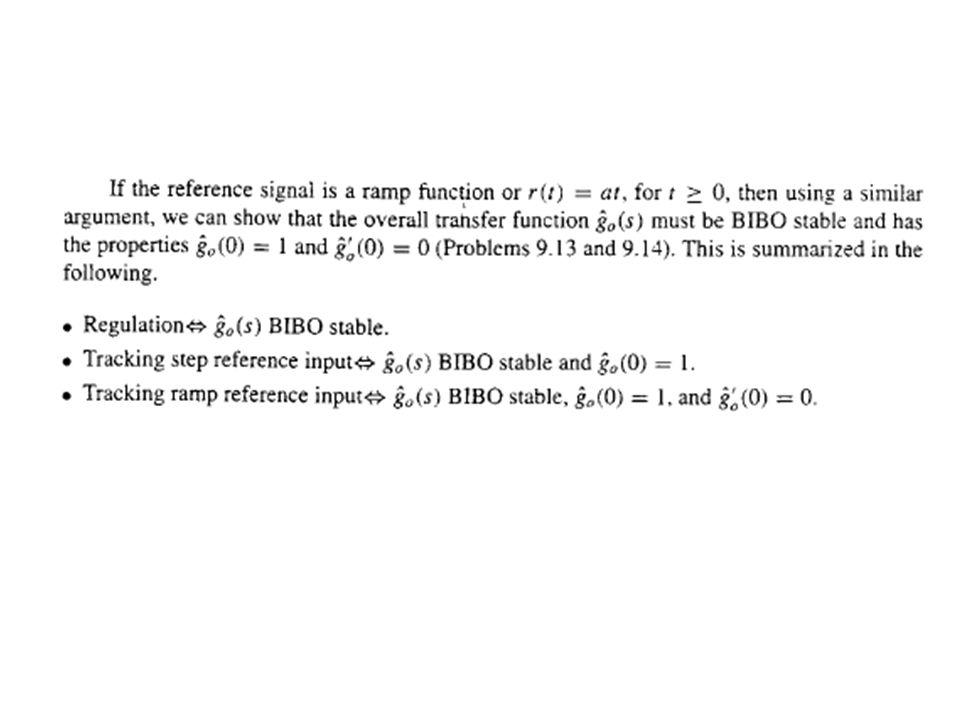
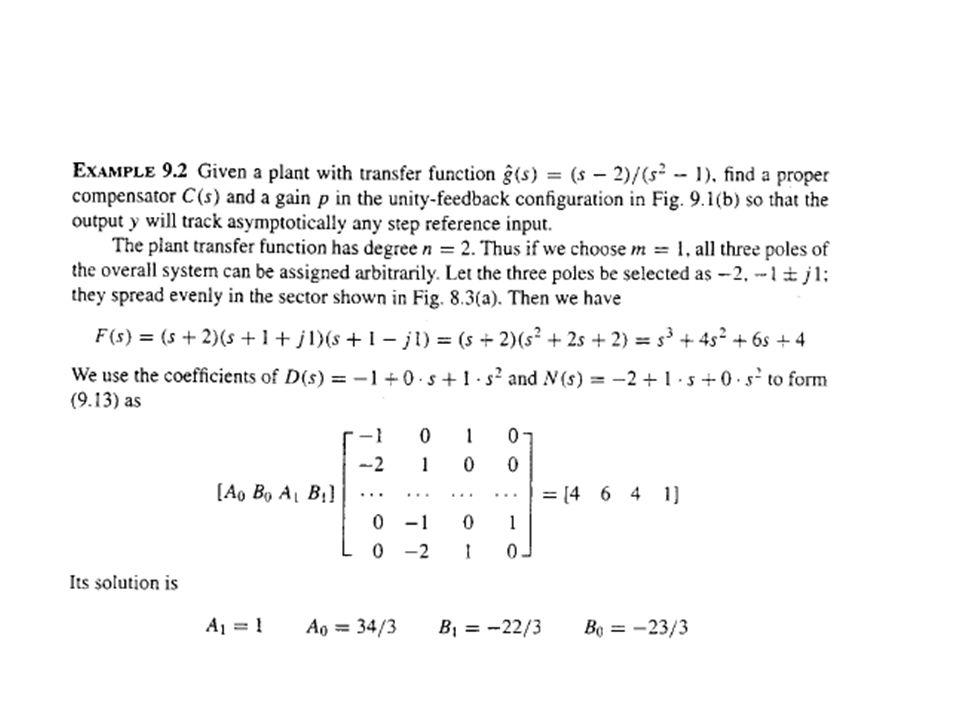
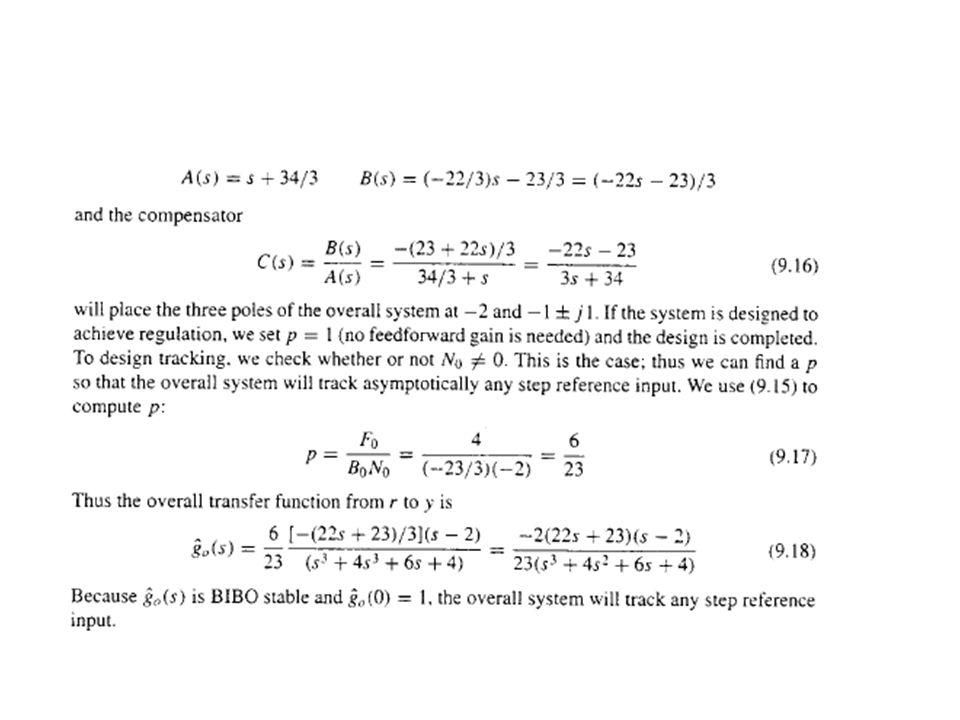
Regulação e seguimento

25
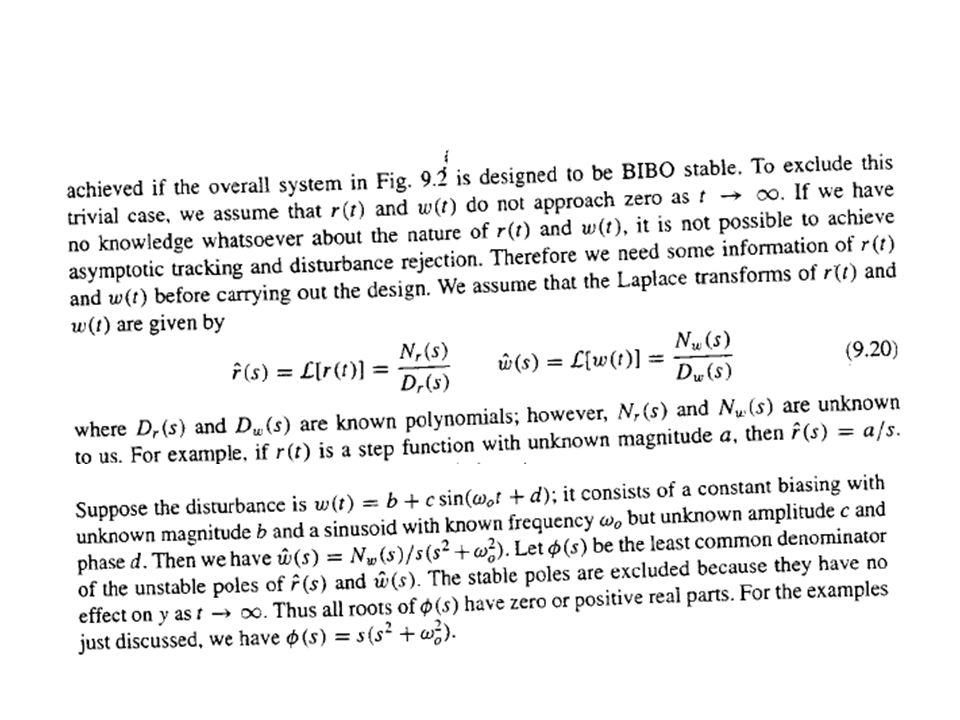
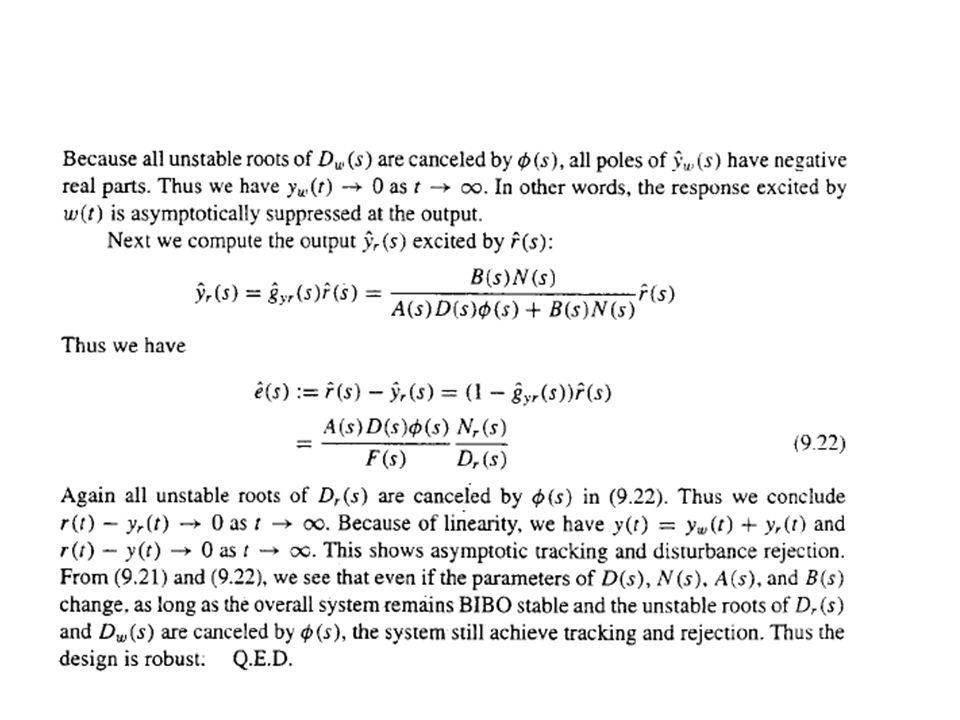
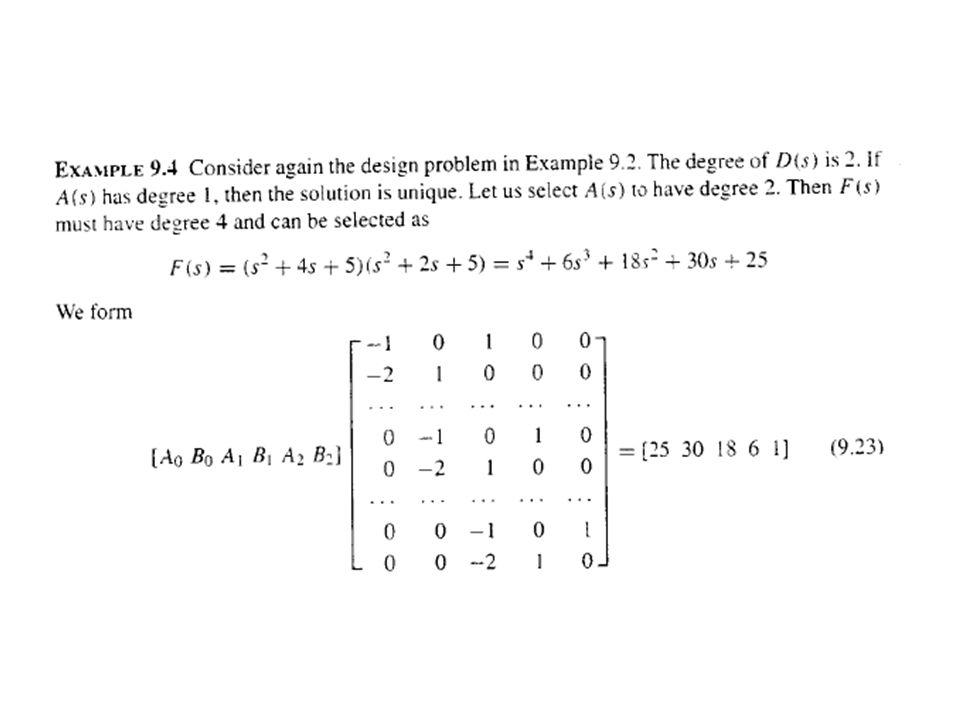
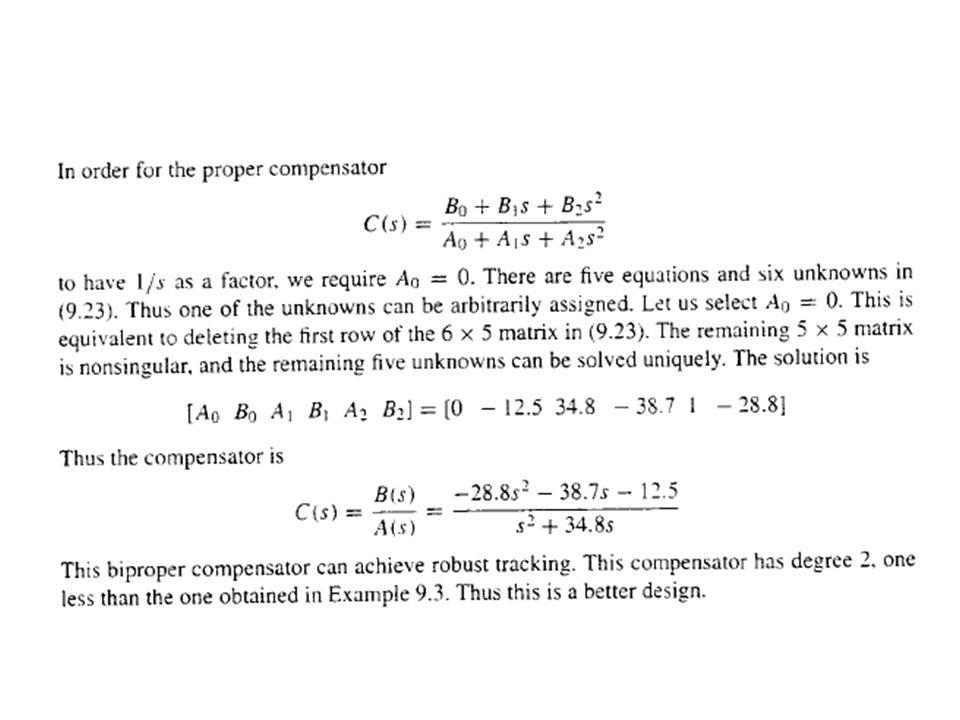
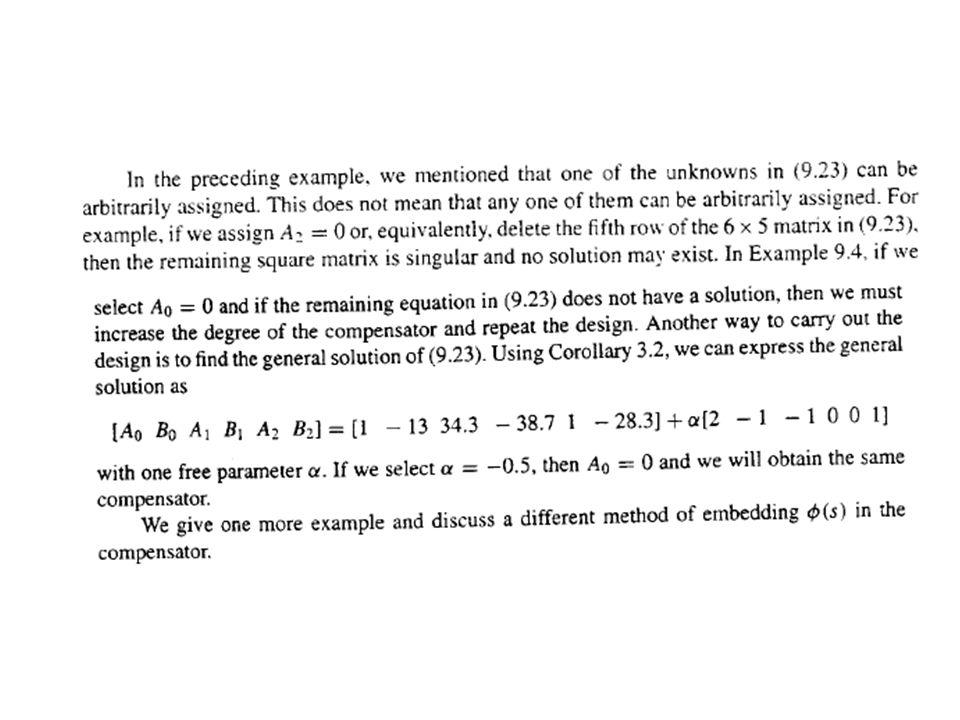
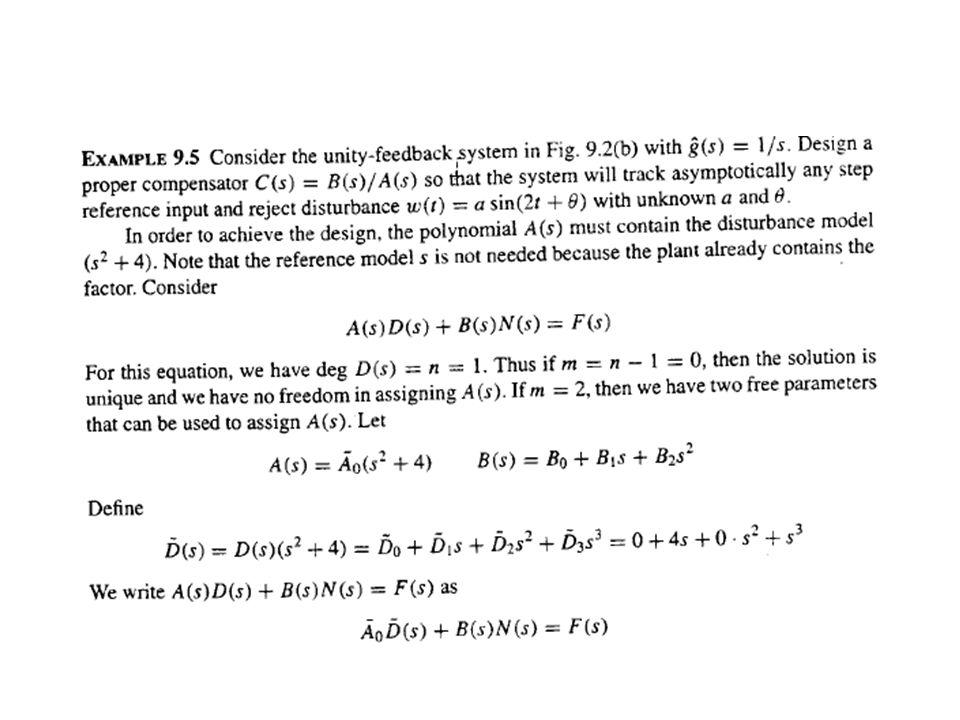
Seguimento robusto e rejeição de perturbações

33
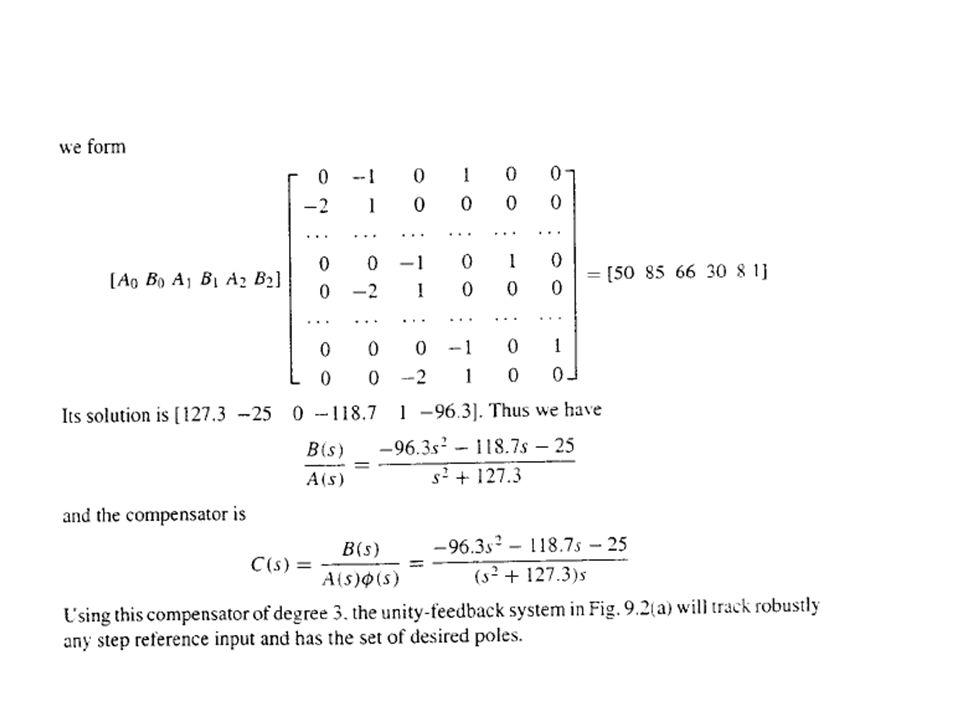
Embutindo modelos internos
Incluiremos agora o termo 1/Φ(s) no controlador B(s)/A(s), reduzindo assim a sua ordem
 no controlador B(s)/A(s), reduzindo assim a sua ordem.")
39
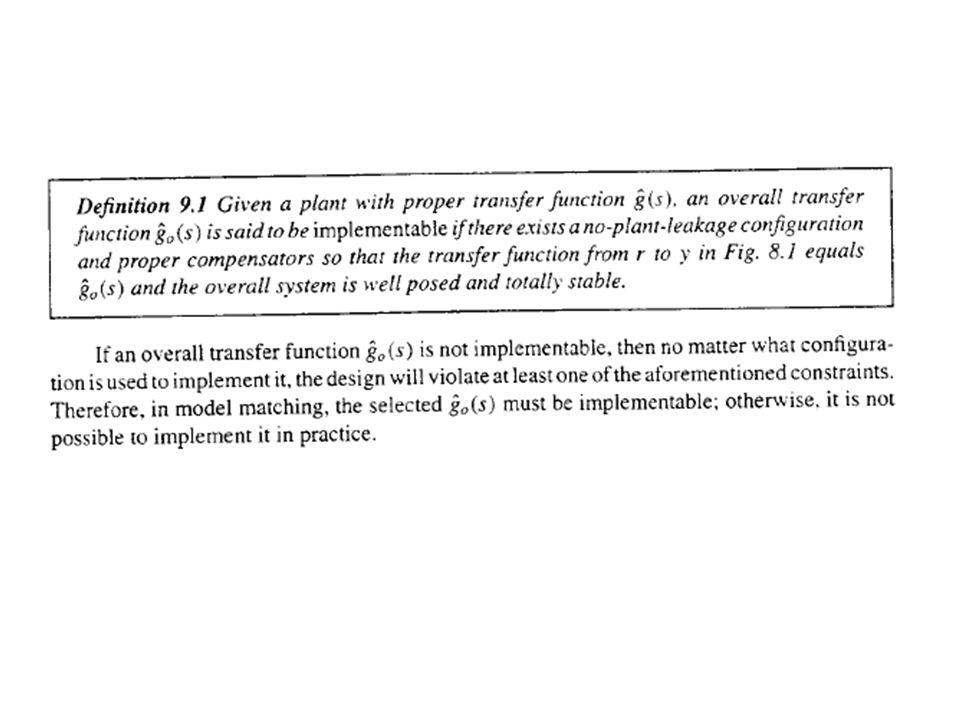
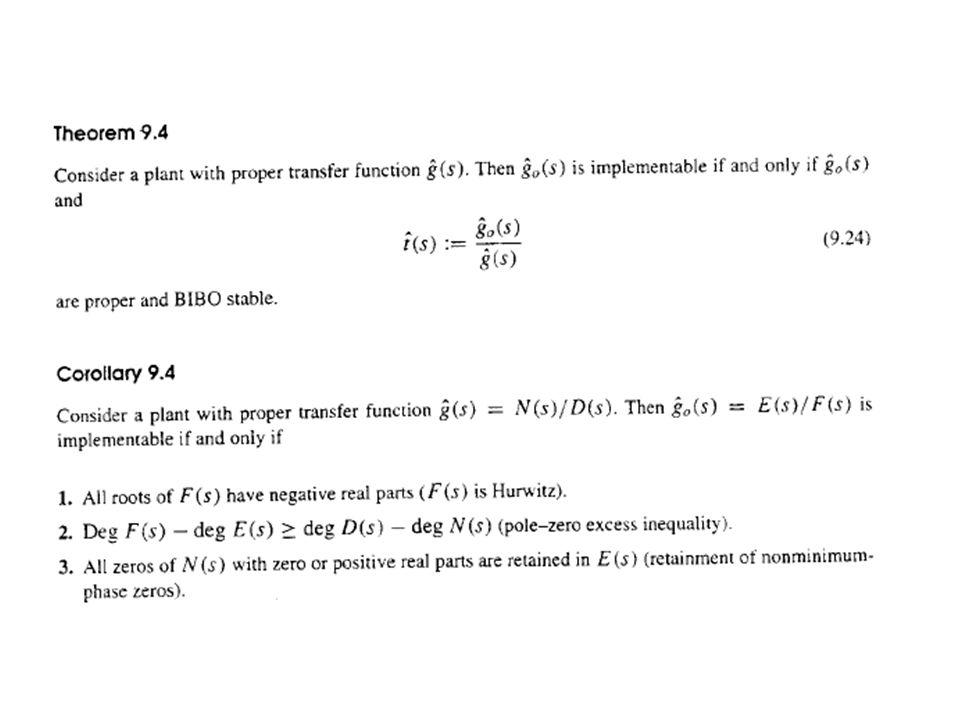
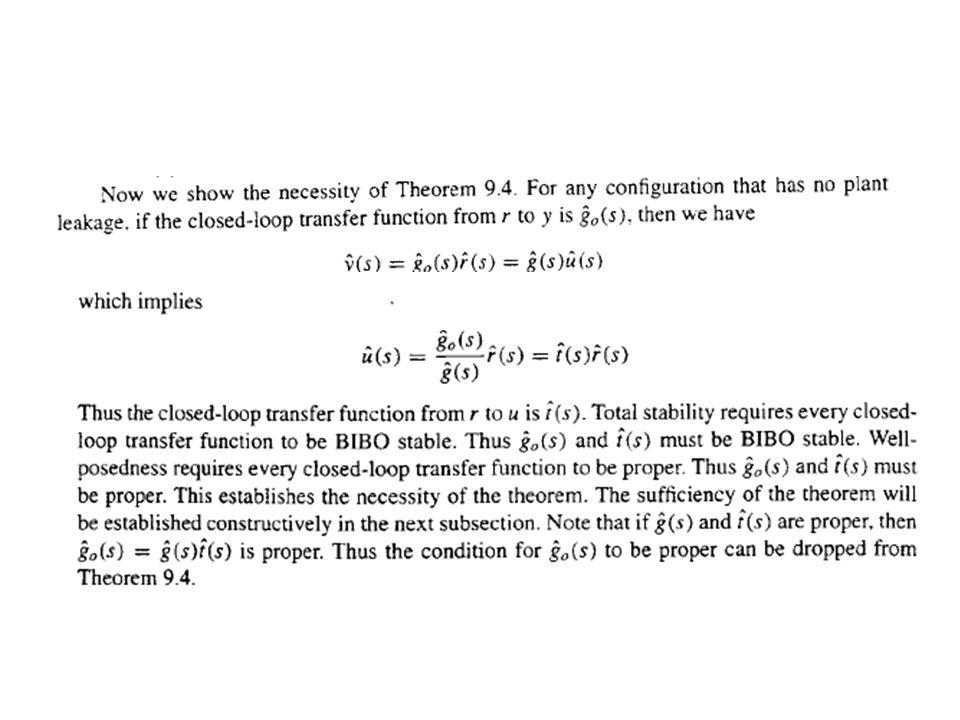
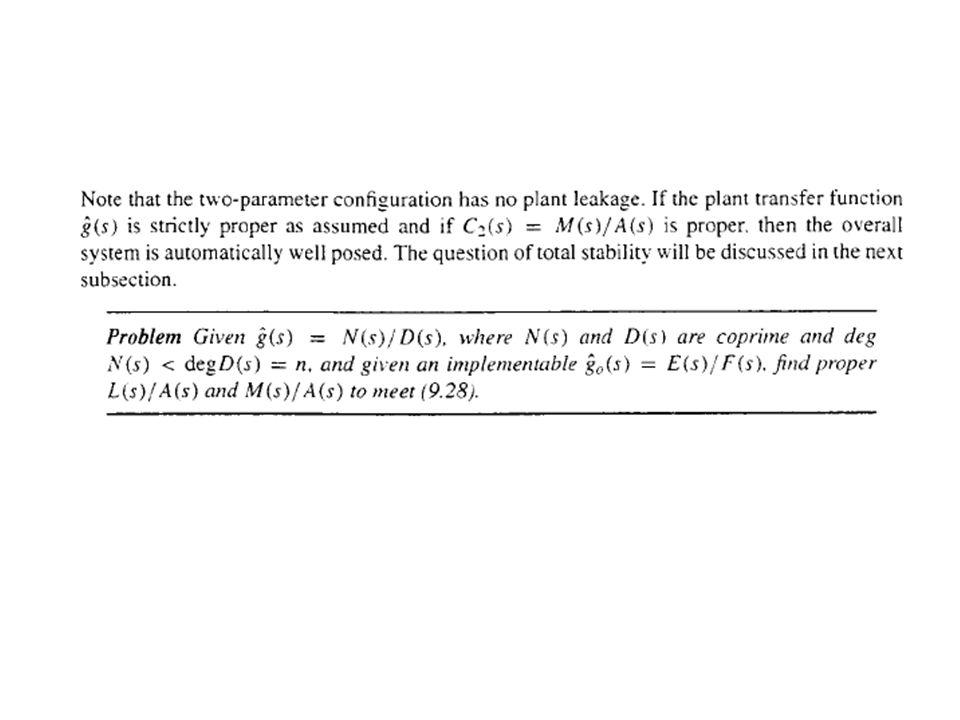
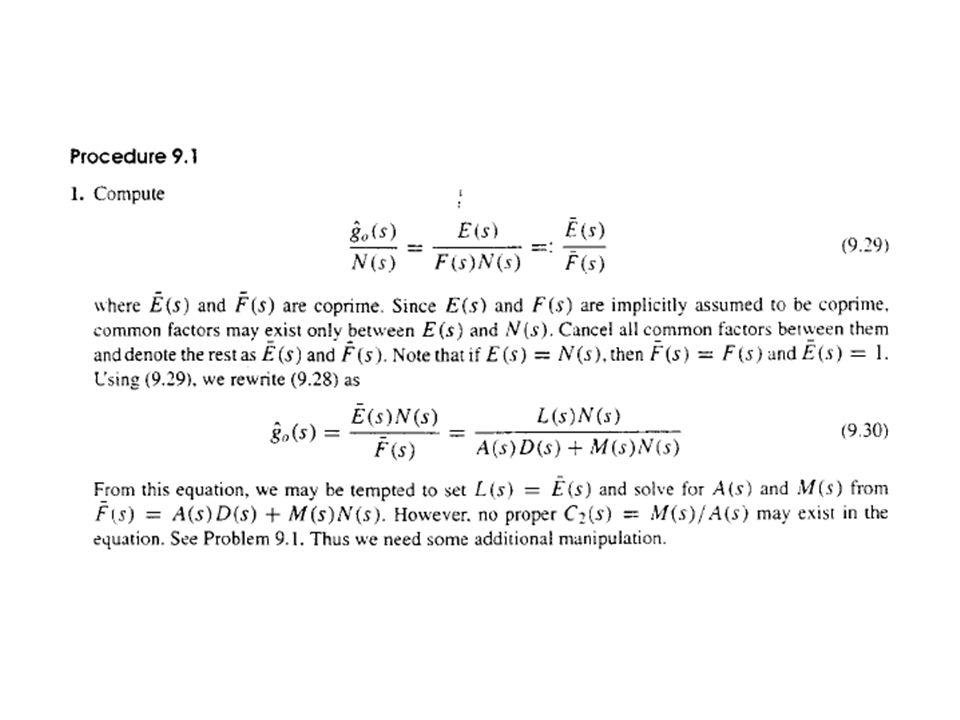
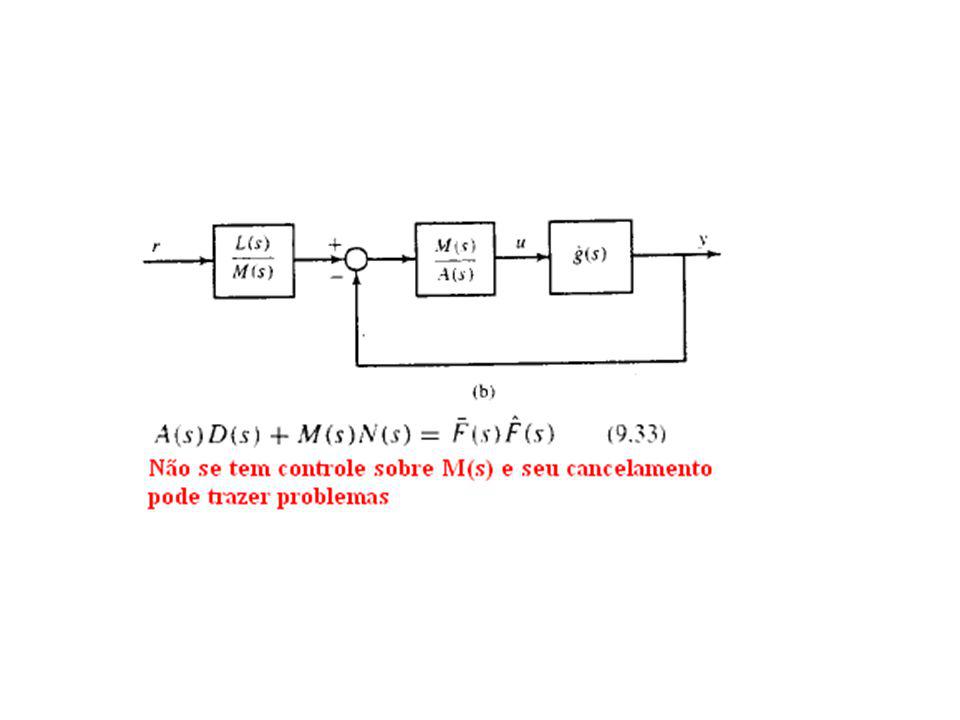
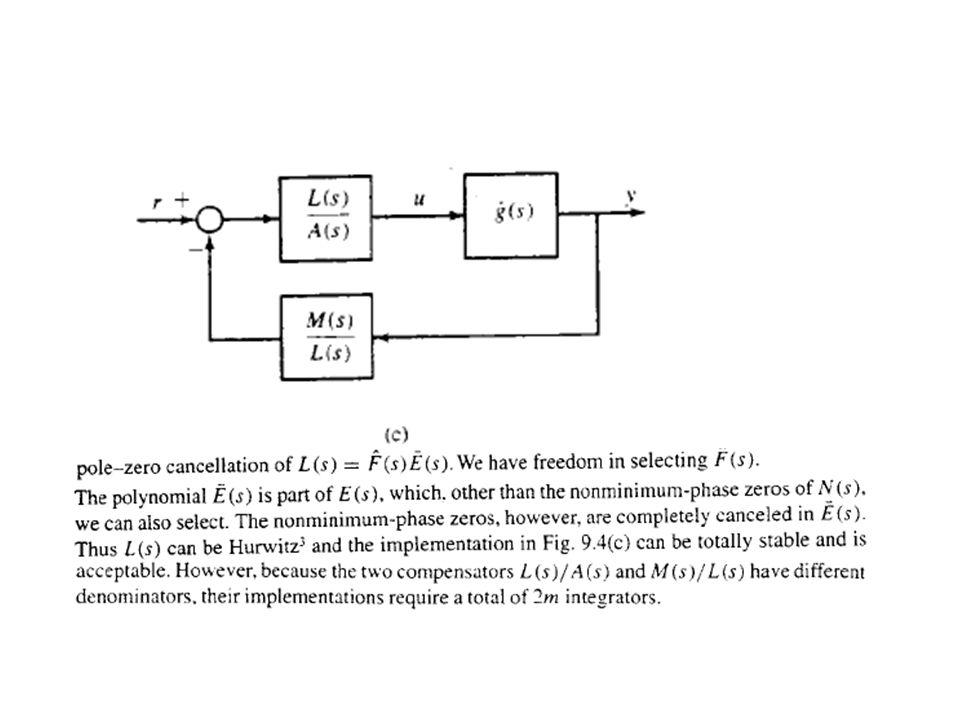
Funções de transferência implementáveis

61
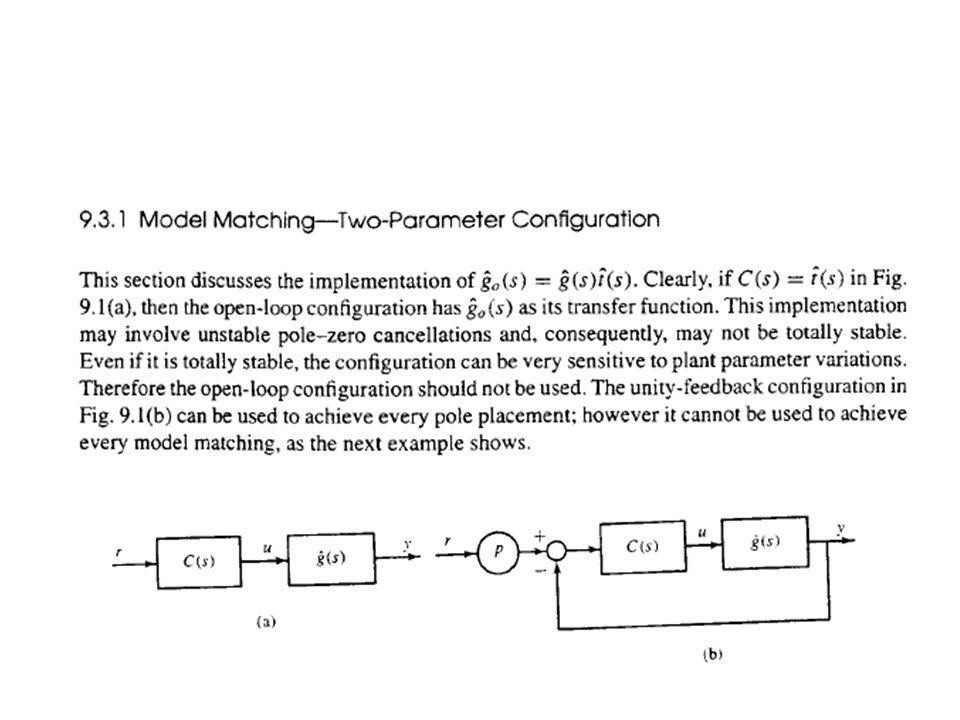
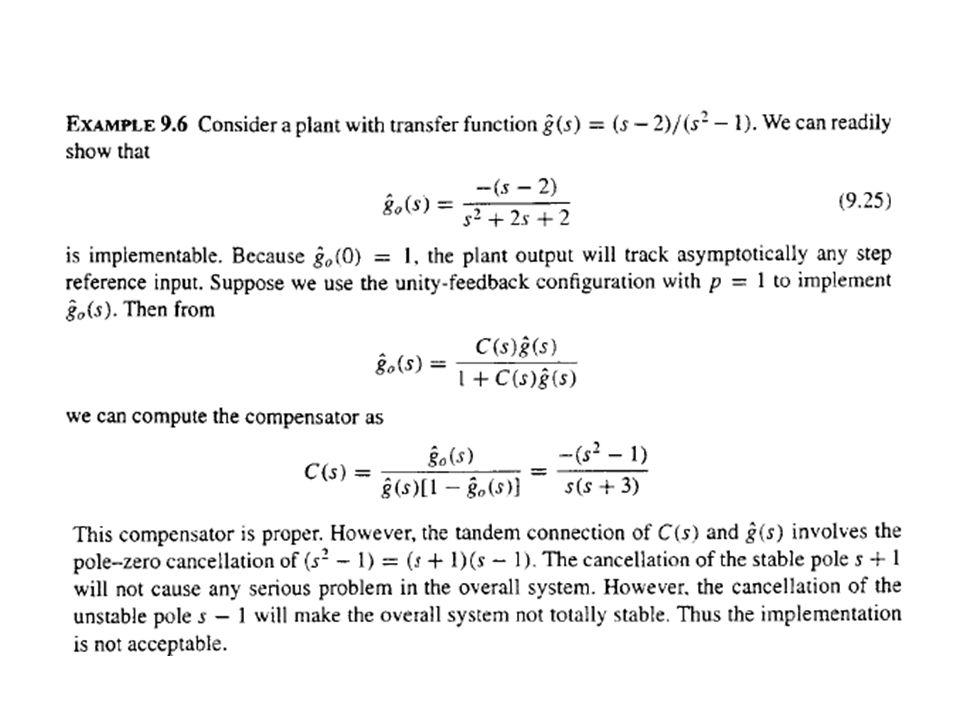
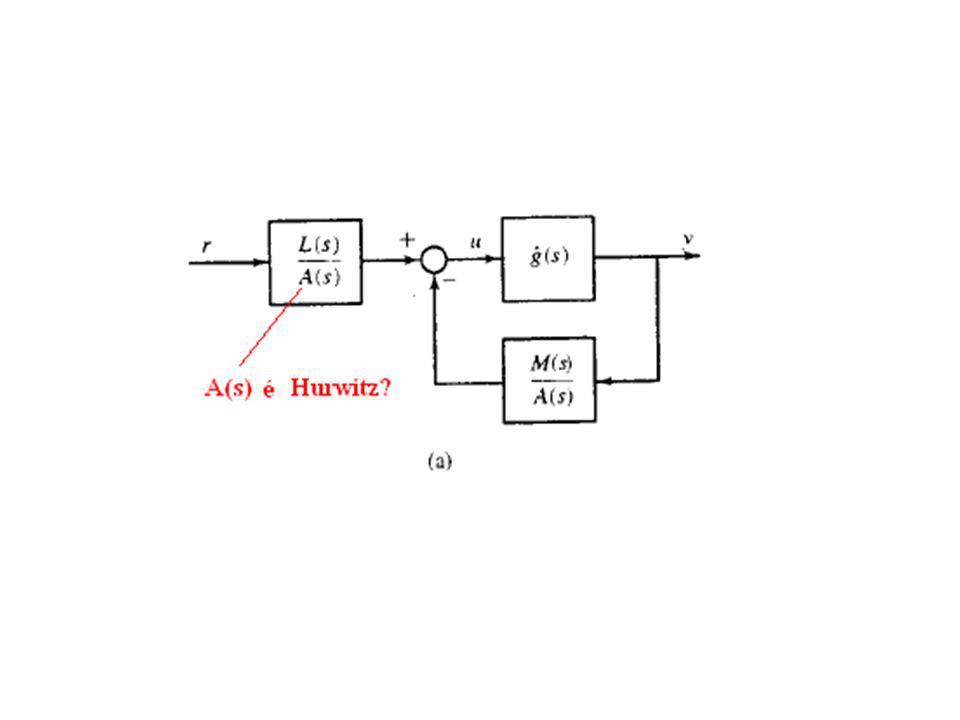
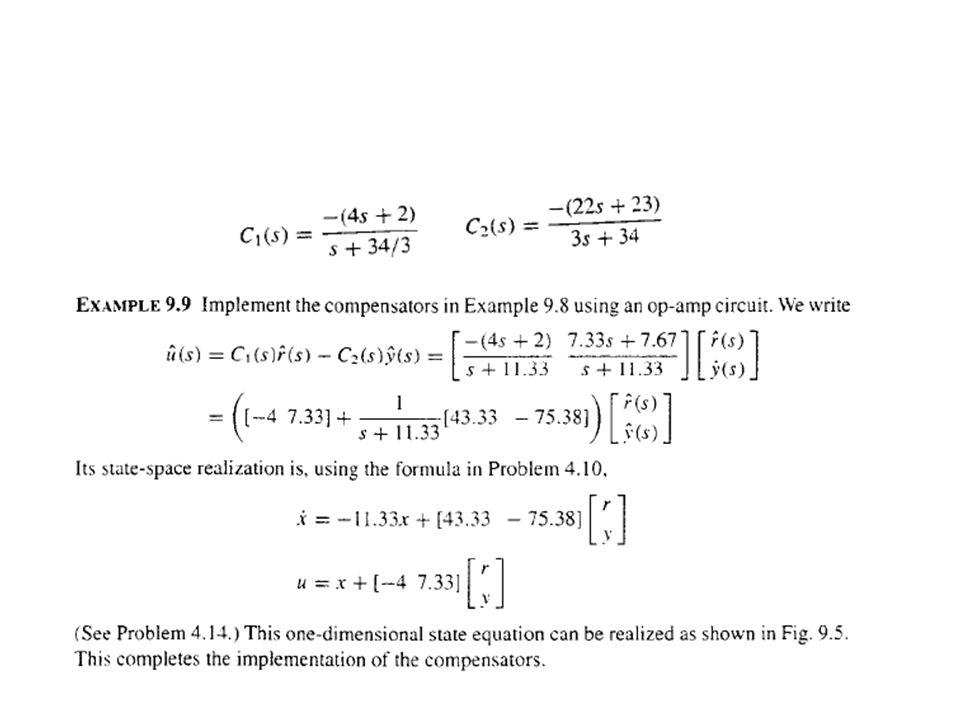
Implementação do controlador com dois graus de liberdade