Carregar apresentação
A apresentação está carregando. Por favor, espere

1
UTFPR – CEAUT 2011 Tópicos em Controle Sistemas Contínuos

2
UTFPR – CEAUT 2011 Conceitos Básicos

3
Sistemas Lineares e Invariantes Equação Característica
Tópicos em Controle Sistemas Lineares e Invariantes Equação Característica Estabilidade Resposta Transitória Resposta em Regime Permanente

4
Planta (componentes físicos) Sistema Distúrbio Controle Realimentado
Definições Planta (componentes físicos) Sistema Distúrbio Controle Realimentado Resposta transitória Resposta em regime permanente Canal Direto Canal de Retroação
 Sistema. Distúrbio. Controle Realimentado. Resposta transitória. Resposta em regime permanente. Canal Direto. Canal de Retroação.")
5
Representações

6
Diagrama de Blocos Equação Diferencial Representações R + e(t) i(t) L
_ C a

7
Transformada de Laplace
Mapeamento no plano s Vantagem Matemática Solução de equações diferenciais Definição de função de transferência

8
Definição da Transformada de Laplace
Transformada Direta Transformada Inversa Propriedade

9
Laplace - Plano s

10
Propriedades - Laplace

11
Transformada de Laplace - Convolução
x(t) y(t)= x(t)*h(t) h(t) X(S) Y(S)= X(S).H(S) H(S)
 y(t)= x(t)*h(t) h(t) X(S) Y(S)= X(S).H(S) H(S)")
12
Modelos de Sistemas Físicos
Estado de uma sistema se refere as condições passadas, presentes e futuras do mesmo. Variáveis de estado ELEMENTO ENERGIA VARIÁVEL FÍSICA Capacitância C Tensão v Indutância L Corrente i Massa M Velocidade de translação v Momento de inércia J Velocidade angular w Elastância K Deslocamento x

13
Circuito RLC vr (t) + vl(t) + vc = e(t) Variáveis de estado
 + vl(t) + vc = e(t) Variáveis de estado")
14
A – matriz de estado B – matriz de controle x- vetor de estado
Equação de estado A – matriz de estado B – matriz de controle x- vetor de estado u – vetor de entrada

15
D – matriz de transmissão direta y- vetor resposta
Equação de estado Se a saída do sistema for x1 y = Cx+Du, C – matriz de saída D – matriz de transmissão direta y- vetor resposta

16
Diagrama de Blocos y(t) D(t) B(t) d(t) A(t) C(t) x(t) u(t)
 D(t) B(t) d(t) A(t) C(t) x(t) u(t)")
17
Modelagem por meio da FT Sistema Elétrico – Circuito RLC

18
Sistema do “Carrinho” - Força X Velocidade

20
Equação de Saída

21
Diagrama de Blocos do Sistema
d(t) v(t)=y(t) F(t)=u(t) v(t) 1 m b m
 v(t)=y(t) F(t)=u(t) v(t) 1 m. b m.")
23
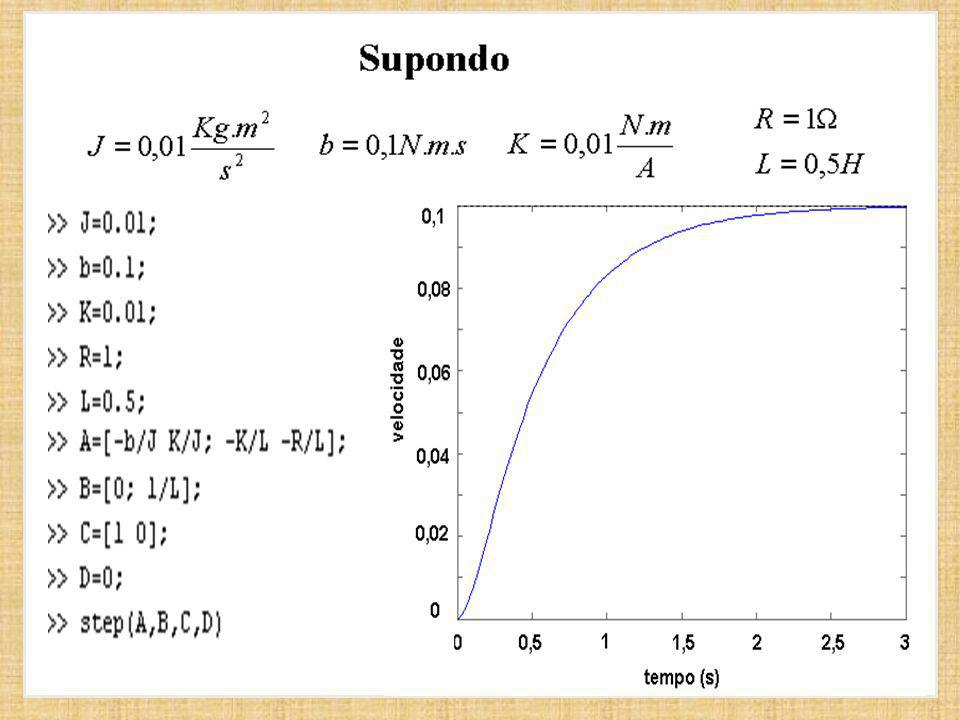
Exemplo de Modelamento de Sistema
Sistema do Motor – Tensão x Velocidade

25
Desenvolvendo as Equações

26
Equação de estado

27
Comparando com as Equações

28
Diagrama de Blocos do Sistema
y(t)=w(t) d(t) 1 0 x(t) u(t)=V(t) -b K J J -K -R L L 1 L
=w(t) d(t) 1 0. x(t) u(t)=V(t) -b K J J. -K -R L L. 1 L.")
30
V(S) W(S) J.L.S2+(J.R+b.L).S+(b.R+K2)
 W(S) 1 J.L.S2+(J.R+b.L).S+(b.R+K2)")
31
Modelagem por meio da FT
Sistema de Fluído – Planta de Nível

32
Considerando: Q – valor da vazão quando sistema estável qi - pequeno desvio de vazão na entrada qo- pequeno desvio de vazão na saída N – valor do nível quando sistema estável n – pequeno desvio de nível E ainda: R e C

33
Outras considerações:
O sistema é linear se o fluxo for laminar (no de Reynolds < 2000). Mesmo sendo turbulento (no de Reynolds > 3000) pode ser linearizado se as variações de qo, qi e n forem muito pequenas.” Considerando o sistema linear a equação diferencial para o sistema pode ser obtida como: vazão de entrada menos a vazão de saída em pequeno intervalo de tempo é a quantidade armazenada.”
. Mesmo sendo turbulento (no de Reynolds > 3000) pode ser linearizado se as variações de qo, qi e n forem muito pequenas. Considerando o sistema linear a equação diferencial para o sistema pode ser obtida como: vazão de entrada menos a vazão de saída em pequeno intervalo de tempo é a quantidade armazenada.")
34
Então para se obter a FT da planta:

35
Y(S) + - Controle (Kp) Proporcional R RCS + 1 Ganho da Bóia R(S) X(S) E(S) Qi(S)
 + - Controle (Kp) Proporcional R RCS + 1 Ganho da Bóia R(S) X(S) E(S) Qi(S)")
Apresentações semelhantes












>")









