Carregar apresentação
A apresentação está carregando. Por favor, espere

1
Representação no Domínio do Tempo de
Sistemas Lineares e Invariantes no Tempo (SLITs) Resposta Impulsional Definição; Resposta no tempo de um SLIT descrito pela resposta impulsional: soma e integral de convolução; Propriedades dos SLITs e sua relação com a resposta impulsional Sistema com e sem memória; Causalidade; Estabilidade; Resposta ao escalão unitário vs. resposta impulsional. Equações Diferenciais e às Diferenças. Resolução de equações diferenciais e às diferenças; Diagrama de blocos. Modelo de Estado Transformações de semelhança; Diagonalização; Solução da equação de estado; Cálculo da matriz de transição; Resposta impulsional.
 Resposta Impulsional. Definição; Resposta no tempo de um SLIT descrito pela resposta impulsional: soma e integral de convolução; Propriedades dos SLITs e sua relação com a resposta impulsional. Sistema com e sem memória; Causalidade; Estabilidade; Resposta ao escalão unitário vs. resposta impulsional. Equações Diferenciais e às Diferenças. Resolução de equações diferenciais e às diferenças; Diagrama de blocos. Modelo de Estado. Transformações de semelhança; Diagonalização; Solução da equação de estado; Cálculo da matriz de transição; Resposta impulsional.")
2
Resposta impulsional SLIT …
resposta no tempo do SLIT quando a entrada é um impulso unitário impulso unitário discreto resposta impulsional SLIT discreto SLIT impulso unitário de Dirac resposta impulsional SLIT contínuo Exemplo SLIT …

3
Resposta no tempo SLIT discreto O SLIT é linear
O SLIT é invariante no tempo Mas (soma de convolução)
")
4
Resposta no tempo Exemplo

5
Propriedades da soma de convolução
Comutativa: Associativa:

6
Propriedades da soma de convolução
SLITs em série A convolução é associativa A convolução é comutativa A convolução é associativa

7
Propriedades da soma de convolução
Distributiva em relação à adição: SLITs em paralelo A convolução é distributiva

8
Resposta no tempo O integral de convolução é: comutativo; associativo;
SLIT contínuo integral de convolução O integral de convolução é: comutativo; associativo; distributivo em relação à adição.

9
Resposta no tempo Exemplo es e-s

10
Propriedades dos SLITs
1. Memória Um sistema diz-se sem memória quando a saída num dado instante de tempo depende apenas da entrada nesse instante de tempo. SLIT discreto sem memória futuro da entrada presente da entrada passado da entrada SLIT contínuo sem memória

11
Propriedades dos SLITs
2. Causalidade Um sistema diz-se causal quando a saída num dado instante de tempo depende apenas da entrada nesse instante de tempo e/ou de instantes anteriores. presente da entrada passado da entrada futuro SLIT discreto causal SLIT contínuo causal

12
Propriedades dos SLITs
3. Estabilidade Um sistema diz-se estável (de entrada limitada/saída limitada) quando qualquer entrada limitada dá origem a uma saída limitada, i.e., SLIT discreto estável A resposta impulsional de um SLIT discreto estável é uma função absolutamente somável, i.e.
 quando qualquer. entrada limitada dá origem a uma saída limitada, i.e., SLIT discreto estável. A resposta impulsional de um SLIT discreto estável é uma função absolutamente somável, i.e.")
13
Propriedades dos SLITs
SLIT discreto estável Exemplo O SLIT é estável quando |a|<1 porque h(n) é absolutamente somável.
 é absolutamente somável.")
14
Propriedades dos SLITs
3. Estabilidade A resposta impulsional de um SLIT contínuo estável é uma função absolutamente integrável, i.e. Exemplo O SLIT é estável quando a>0 porque h(t) é absolutamente integrável.
 é absolutamente integrável.")
15
Resposta ao escalão unitário vs. resposta impulsional
SLIT discreto Exemplo y(n) n 3 2 -1 -2 -3 1 … y(n-1) 2 1 … h(n) n 3 2 -1 -2 -3 1 …
 n … y(n-1) … h(n) n …")
16
Resposta ao escalão unitário vs. resposta impulsional
SLIT contínuo Exemplo

17
Equações diferenciais
Sistema de 1ª ordem

18
Resolução de equações diferenciais
Sistema contínuo Sinal de entrada: Modelo: Condição inicial:

19
Resolução de equações diferenciais
Solução particular Solução homogénea ? ? ?

20
? Resolução de equações diferenciais Solução homogénea
equação característica

21
Resolução de equações diferenciais
Solução particular

22
Resolução de equações diferenciais
Solução particular

23
Resolução de equações diferenciais
Resposta completa ? Condição inicial + continuidade da solução

24
Resolução de equações diferenciais
Resposta completa devido a y0 devido a x(t) regime transitório regime estacionário
 regime transitório. regime estacionário.")
25
Resolução de equações diferenciais
rad/s; ;

26
Sistema contínuo de ordem N
Condições iniciais: Solução: mesma forma do sinal de entrada Equação característica Propriedades - sistema invariante no tempo e causal Condições iniciais: nulas – sistema linear não nulas – sistema incrementalmente linear

27
Equações às diferenças
Sistema discreto Sistema de 2ª ordem Condições iniciais Cálculo de para : etc

28
Resolução de equações às diferenças
Sistema discreto Sinal de entrada: Modelo: Condição inicial:

29
Resolução de equações às diferenças
Solução particular Solução homogénea ? ? Equação característica:

30
Resolução de equações às diferenças
Solução particular

31
Resolução de equações às diferenças
Resposta completa

32
Resolução de equações às diferenças

33
Sistema discreto de ordem N
Condições iniciais: Solução: mesma forma do sinal de entrada Equação característica Propriedades - sistema invariante no tempo e causal Condições iniciais: nulas – sistema linear não nulas – sistema incrementalmente linear

34
Diagrama de blocos

35
Diagrama de blocos Forma directa I

36
Diagrama de blocos

37
Diagrama de blocos Forma directa II

38
Modelo de Estado Equações de estado: Variáveis de estado
Equação de saída

39
Modelo de Estado Vector de estado: Equações de estado:
Equação de saída:

40
Diagrama de blocos

41
Diagrama de blocos Forma directa I

42
Diagrama de blocos Forma directa II

43
Modelo de Estado Equações de estado: Equação de saída

44
Modelo de Estado Vector de estado: Equações de estado:
Equação de saída:

45
Contínuo Discreto Modelo de Estado estados, entradas, saídas.
Equação de Estado Equação de Saída - matriz da dinâmica - matriz de entrada - matriz de saída constantes Sistema invariante no tempo

46
Modelo de Estado Vector de estado

47
Equação diferencial

48
Equação diferencial

49
Equação Diferencial vs. Modelo de Estado
O modelo de estado de um sistema não é único

50
Transformação de semelhança
Modelo I Modelo II não singular

51
Transformação de semelhança

52
Transformação de semelhança

53
Transformação de semelhança

54
Transformação de semelhança

55
Transformação de semelhança

56
Diagonalização Dada uma matriz da dinâmica A, qual a transformação de coordenadas, T, que conduz a uma matriz da dinâmica diagonal? Que condição deve satisfazer A para que exista uma transformação de coordenadas s(t)= Tz(t) com T não singular, tal que D=T-1AT seja uma matriz diagonal?
= Tz(t) com T não singular, tal que D=T-1AT seja uma matriz diagonal")
57
Diagonalização A matriz A é diagonalizável sse for de estrutura simples, i.e., os vectores próprios de A são linearmente independentes. Valores próprios: Vectores próprios:

58
Diagonalização matriz de transformação vectores próprios
de coordenadas Diagonalização vectores próprios linearmente independentes

59
Diagonalização A é de estrutura simples sempre que:
os valores próprios de A são todos distintos A é simétrica, i.e., A=AT

60
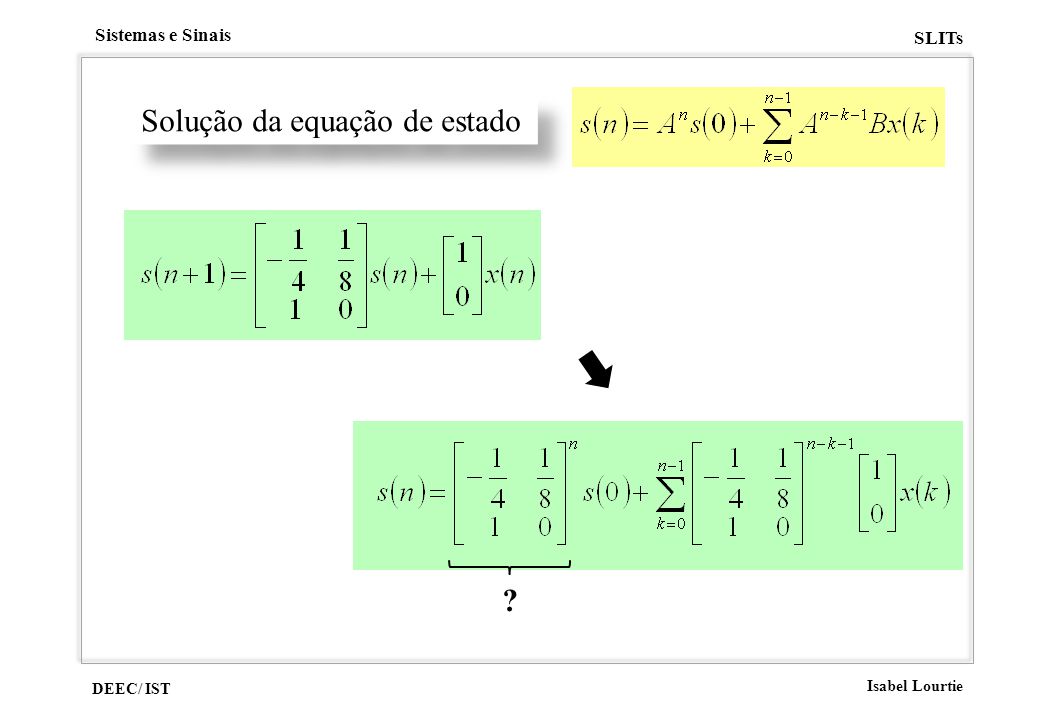
Solução da equação de estado
Sistema discreto

61
Solução da equação de estado
?
62
é de estrutura simples? Cálculo de An A é diagonalizável:

63
Cálculo de An

64
Solução da equação de estado

65
Resposta no tempo do sistema

66
Resposta no tempo do sistema

67
Resposta impulsional Sistema inicialmente em repouso:

68
Solução da equação de estado
Sistema contínuo ?

69
Cálculo de eAt é de estrutura simples A é diagonalizável: com
Expansão em série de Taylor de eAt

70
Solução da equação de estado

71
Resposta no tempo do sistema

72
Resposta no tempo do sistema

73
Resposta impulsional Sistema inicialmente em repouso:

Apresentações semelhantes



















