Carregar apresentação
A apresentação está carregando. Por favor, espere

1
Processamento de Imagens
Representação e Descrição

2
Contexto

3
Processamento baixo nível
Realce de imagem, restauração, transformações Nível intermediário Representação e descrição

4
Processamento alto nível (reconhecimento e interpretação)
reconhecimento de objetos, classificação, etc

5
Reconhecimento de Regiões
Descrição das regiões de forma adequada para um classificador vetor de características (numérico) descrição sintática não-numérica Caracterizar propriedades (Forma - Shape) de uma região. Aplicável a objetos 2D e 3D (necessidade de + de um viewpoint)
 descrição sintática não-numérica. Caracterizar propriedades (Forma - Shape) de uma região. Aplicável a objetos 2D e 3D (necessidade de + de um viewpoint)")
6
Importância OCR (Optical Character Recognition)
ECG (Electro-Cardiogram) EEG(Electro-Encephalogram) Classificação de células Reconhecimento de cromossomos Inspeção automática CBIRS (Content-based Image Retrieval System) Inúmeras outras aplicações
 EEG(Electro-Encephalogram) Classificação de células. Reconhecimento de cromossomos. Inspeção automática. CBIRS (Content-based Image Retrieval System) Inúmeras outras aplicações.")
7
Reconhecer o que é visto
Alongado? Textura Fourier I.A. Reconhecer o que é visto

8
Tópicos importantes Identificação da Região
Descrição e representação baseadas em contornos Descrição e representação baseadas em regiões Descritores de cor

9
Representação de regiões
Características externas Contorno Características internas pixels que compõem a região. Região representada por seu contorno, por sua vez descrito por características como comprimento, nro de concavidades, etc.

10
Representação de regiões
Normalmente uma representação externa enfoca as características da Forma Representação interna enfoca aspectos como cor e textura. Importante: em ambos os casos devem ser considerados a invariabilidade quanto ao tamanho, rotação, translação ! P(T(I)) = T(P(I)) P = propriedade T = transformação
) = T(P(I)) P = propriedade T = transformação.")
11
Definir a Forma Tarefa difícil Não há metodologia genericamente aceita
alongada, arredondada, com arestas salientes, etc. Não há metodologia genericamente aceita Nem sempre se sabe o que é importante na forma Suficiente para a maioria das aplicações

12
Identificação de regiões
É preciso identificar a região p/ descrevê-la. Como ? Rotulação (connected component labelling) input: imagem segmentada definir grau de conectividade entre pixels rotular as regiões (1..N), N é o nro total de regiões.
 input: imagem segmentada. definir grau de conectividade entre pixels. rotular as regiões (1..N), N é o nro total de regiões.")
13
Identificação de regiões

14
Dois componentes conectados, considerando-se pixels 4-conectados
![]()
15
Algoritmo de CCL Connected Component Labeling

16
Imagem binária Rotulagem de 1-8 Atribuição de cores distintas a cada um dos rótulos

17
Quantos perus há na imagem?
Original Thresholded Rotulagem Coloração (196 regiões)
")
18
Representação de forma por contorno
Chain Codes Representações geométricas comprimento curvatura bending energy (energia de “modelagem”) assinatura distribuição de chords (linha que une qq dois pontos de uma borda)
 assinatura. distribuição de chords (linha que une qq dois pontos de uma borda)")
19
Representação de forma por contorno
Descritores de Fourier Seqüências de segmentos B-Spline Redes Neurais Transformada de Hough

20
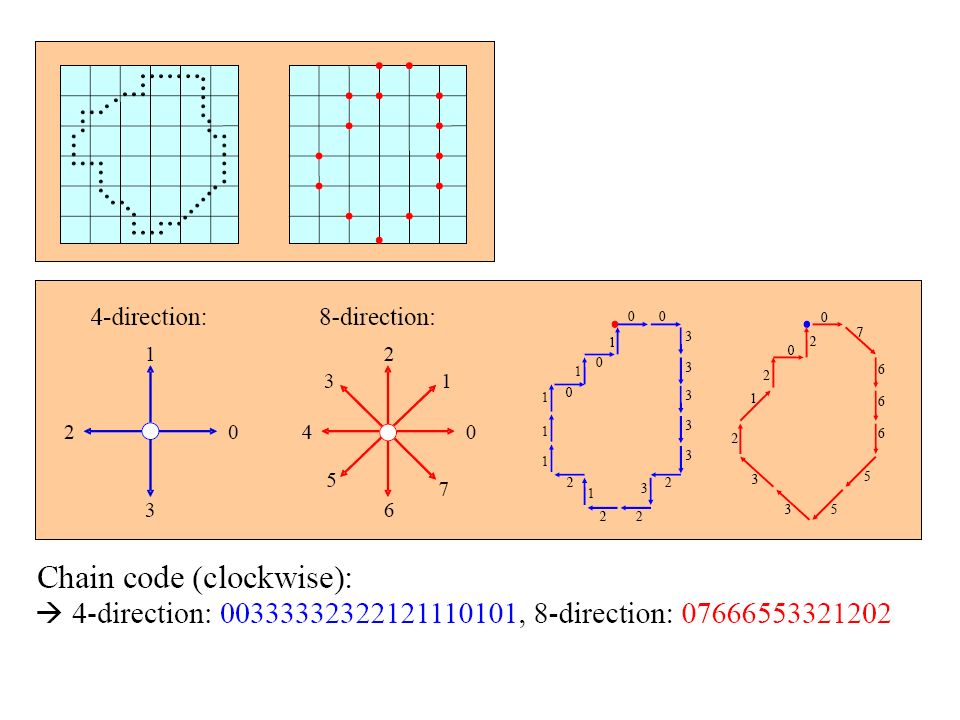
Chain Codes Representam um contorno por uma seqüência conectada de segmentos de retas com comprimento e direções específicas. Depende da conectividade, ponto inicial, rotação Torná-lo independente do ponto inicial Torná-lo independente da rotação. pode-se normalizar o chain code para rotação usando a derivada anti-horária à 90o (derivative)
")
22
Chain Codes Depende da conectividade, ponto inicial, rotação
Torná-lo independente do ponto inicial Procurar a representação que gera o menor nro Torná-lo independente da rotação. derivada anti-horária à 90o (derivative)
")
23
Chain Codes

24
Representações Geométricas (Representações sensíveis à resolução da imagem)
Comprimento do contorno derivado do chain code: passos horizontais e verticais = 1 passos diagonais: sqrt(2). Precisão 8-conectividade > 4-conectividade Também conhecido por perímetro closed-boundary length Considerar a outer-border
. Precisão 8-conectividade > 4-conectividade. Também conhecido por perímetro. closed-boundary length. Considerar a outer-border.")
25
Representações Geométricas
Curvatura caso contínuo: taxa de mudança na inclinação caso discreto: razão entre nro total de pixel da borda (comprimento) e nro de pixel da borda que muda significativamente. Quanto menos mudanças, mais “reto” é o contorno. Como avaliar? Interprete o ângulo distante de b pixels a partir de um pixel de bordo qualquer. Através dos chain codes
 e nro de pixel da borda que muda significativamente. Quanto menos mudanças, mais reto é o contorno. Como avaliar Interprete o ângulo distante de b pixels a partir de um pixel de bordo qualquer. Através dos chain codes.")
26
Representações Geométricas

27
Representações Geométricas
Bending Energy (BE) Energia armazenada no formato Energia necessária p/ dobrar uma vara até uma forma desejável c2(k) é o quadrado da curvatura L é o comprimento da borda
 Energia armazenada no formato. Energia necessária p/ dobrar uma vara até uma forma desejável. c2(k) é o quadrado da curvatura. L é o comprimento da borda.")
28
Bending Energy

29
Representações Geométricas
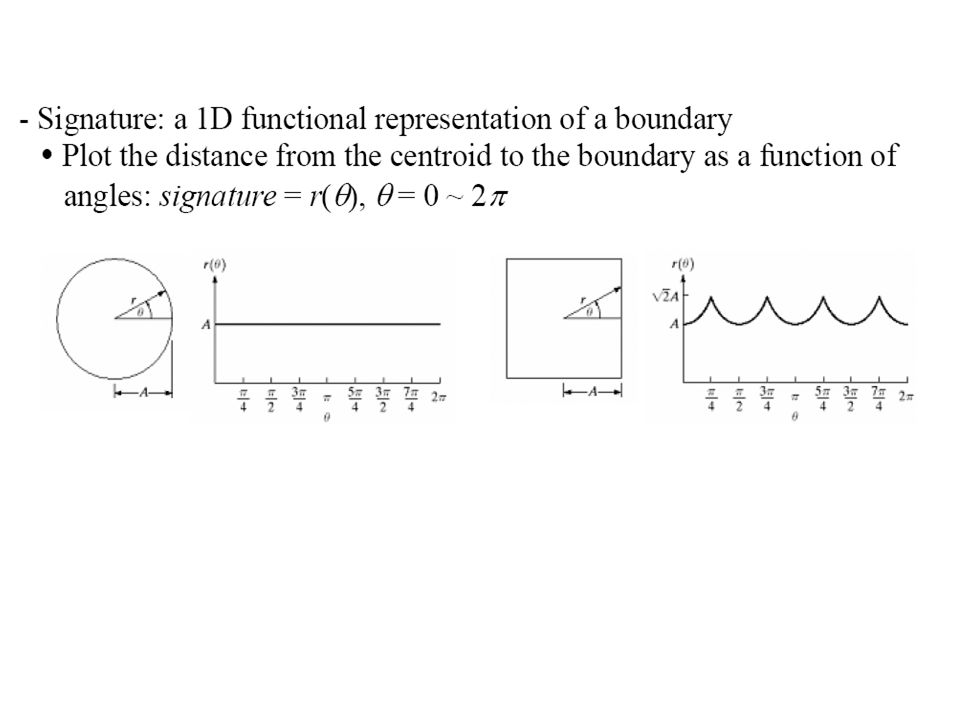
Assinatura representação funcional 1-D de um contorno Como ? por exemplo, a distância do centróide com relação ao ângulo mínima distância de A a B (A e B contorno e são opostos)
")
30
Assinaturas Distância entre A e um ponto
perpendicular B no ponto tangente a A

32
Representações Geométricas
Chord Distribution Chord: linha que une dois pontos de um contorno. Seja b(x,y)=1 pontos do contorno; e b(x,y)=0, outros pontos. A distribuição dos comprimentos e ângulos de todos os chords formam um descritor
=1 pontos do contorno; e b(x,y)=0, outros pontos. A distribuição dos comprimentos e ângulos de todos os chords formam um descritor.")
33
Representações por Contorno
Descritores de Fourier Suponha uma curva fechada no plano dos complexos. Percorrendo-a no sentido anti-horário, veloc. constante, obtém-se uma função complexa z(t). Uma volta completa leva tempo 2. Função periódica. Isso permite uma representação de Fourier para z(t). Comprimento da curva Descritores
. Uma volta completa leva tempo 2. Função periódica. Isso permite uma representação de Fourier para z(t). Comprimento da curva. Descritores.")
34
Como construir DFs a partir de um contorno
Suponha que a borda (contorno fechado) de um “shape” tenha N pixeis numerados 0 – N-1 O pixel k-th do contorno tem a posição (xk,yk). Podemos descrever o contorno como duas equações pararétricas: x(k) = xk y(k) = yk
 de um shape tenha N pixeis numerados 0 – N-1. O pixel k-th do contorno tem a posição (xk,yk). Podemos descrever o contorno como duas equações pararétricas: x(k) = xk. y(k) = yk.")
35
Como construir DFs a partir de um contorno
Podemos extrair TF de cada funcao: ax(ν) = F (x(k)) ay(ν) = F (y(k)) Estes dois espectros são os Descritores de Fourier
 = F (x(k)) ay(ν) = F (y(k)) Estes dois espectros são os Descritores de Fourier.")
36
Como construir DFs a partir de um contorno
Alternativamente, podemos considerar as coordenadas (x,y) do ponto não como coord. Cartesianas, mas no plano complexo: s(k) = x(k) + iy(k) Portanto, a(ν) = F (s(k)) = F (x(k) + iy(k)) = F (x(k)) + iF (y(k)) = ax(ν) + iay(ν) = [(ax(ν))−(ay(ν))] + i [(ax(ν)) + (ay(ν))]
 do ponto não como coord. Cartesianas, mas no plano complexo: s(k) = x(k) + iy(k) Portanto, a(ν) = F (s(k)) = F (x(k) + iy(k)) = F (x(k)) + iF (y(k)) = ax(ν) + iay(ν) = [(ax(ν))−(ay(ν))] + i [(ax(ν)) + (ay(ν))]")
37
Propriedades Suponha que o espectro contenha altas freqüências
Mudanças bruscas em x e y. Contorno irregular Suponha que o sinal tenha poucas altas freqüências Mudanças suaves em x e y. Contorno suave

38
Propriedades (2) Se fizermos um low-pass nos FDs ? Suavização
Os componentes de baixa freqüência capturam a forma geral do objeto Se não usarmos todos os k componentes de a(v), mas somente m < k ? Quem é o primeiro k ??? (lembre fourier ...) Se reconstruíssemos o sinal com estes m componentes ? Compressão ! Pensando assim, FDs agem como momentos: Termos de ordem baixa/menores momentos dão a forma aproximada Adicao de termos adicionais, refinam a forma !
, mas somente m < k Quem é o primeiro k (lembre fourier ...) Se reconstruíssemos o sinal com estes m componentes Compressão ! Pensando assim, FDs agem como momentos: Termos de ordem baixa/menores momentos dão a forma aproximada. Adicao de termos adicionais, refinam a forma !")
39
Respostas a transformações
Vamos usar propriedades da FT Translação: significa adicionar uma constante a cada coordenada (x,y). Portanto, só mudamos o componente de freqüência zero F(0,0) -> (DC) ! Nada sobre a forma em si Portanto, exceto para F(0,0), FDs são invariantes à translação.
. Portanto, só mudamos o componente de freqüência zero F(0,0) -> (DC) ! Nada sobre a forma em si. Portanto, exceto para F(0,0), FDs são invariantes à translação.")
40
Respostas a transformações
Rotação Da análise de Fourier, rotação no plano complexo por um ângulo θ é multiplicação por eiθ Portanto, rotação sobre a origem do sistema de coordenadas, apenas multiplica os FDs por eiθ

41
Respostas a transformações
Escala Suponha que mudemos o tamanho do objeto. Tire suas conclusões comparando esta operação com translação !! Ponto de inicio: Isso não é translação do sinal 1D s(k) ao longo de k ? Translação no domínio espacial (k) corresponde a mudança de fase na transformada !
 ao longo de k Translação no domínio espacial (k) corresponde a mudança de fase na transformada !")
42
Descritores (qtd) Original: M=64 M=4 M=8 M=2 M=62 M=61
 Original: M=64 M=4 M=8 M=2 M=62 M=61")
43
Representações por Contorno
Seqüências de segmentos (segment sequences) aproximação de uma região por um polígono É preciso encontrar os vértices do polígono contorno representado por segmentos de formas variadas apropriado para reconhecimento sintático.
 aproximação de uma região por um polígono. É preciso encontrar os vértices do polígono. contorno representado por segmentos de formas variadas. apropriado para reconhecimento sintático.")
44
Seqüências de segmentos
Determinando os vértices utilizar medida de curvatura. Tolerância de intervalo

45
Determinando os vértices
Divisão recursiva do contorno dividir até satisfazer um certo critério defina reta entre pontos extremos encontre ponto mais distante se distância for maior que um threshold, estabeleça novo ponto e continue recursivamente.

46
Segmentos de formas variadas
Defina “primitivas”: representados por polinômios de 2a ordem (círculos, parábolas) Utilizados em procedimentos sintáticos de classificação de cromossomos: cada primitiva têm um grau de curvatura, concavidade, etc.
 Utilizados em procedimentos sintáticos de classificação de cromossomos: cada primitiva têm um grau de curvatura, concavidade, etc.")
47
Representação de forma por região
Descritores escalares Área Número de Euler Projeção Ecentricidade Elongatedness, Rectangularity, Compactness, Direção

48
Representação de forma por região
Momentos Convex Hull Esqueletonização Decomposição de Regiões

49
Representações por Região
Descritores Escalares calculo baseado em heurística não funcionam bem para formas muito complexas Área: nro de pixels que compõem a região

50
Descritores Escalares
Número de Euler: propriedade topológica topologia: estudo das propriedades de uma imagem que não são afetadas por qualquer deformação (a não ser separação ou união de partes da figura) Nro de Euler: E = C - H C: Componente conectados na figura H: Nro de buracos (Holes)
 Nro de Euler: E = C - H. C: Componente conectados na figura. H: Nro de buracos (Holes)")
51
Descritores Escalares
Projeção Horizontal ph(i)e Vertical ph(j) processamento de imagens binárias
e Vertical ph(j) processamento de imagens binárias.")
52
Descritores Escalares
Excentricidade razão entre o chord de comprimento máximo A e chord B (A e B perpendiculares) B A
 B. A.")
53
Descritores Escalares
Alongamento (elongatedness) Razão entre comprimento e largura do retângulo que circunscreve o contorno este critério não se aplica a regiões curvas, caso em que deve se aplicar o critério de espessura máxima Nro erosões
 Razão entre comprimento e largura do retângulo que circunscreve o contorno. este critério não se aplica a regiões curvas, caso em que deve se aplicar o critério de espessura máxima. Nro erosões.")
54
Descritores Escalares
Retangularidade (Fk) Razão da área da região e a área do bounding box ao contorno Direção do retângulo
 Razão da área da região e a área do bounding box ao contorno. Direção do retângulo.")
55
Descritores Escalares
Compactness a região mais compacta num espaço euclidiano é um círculo

56
Representações por Região
Momentos propriedades estatísticas que descrevem formas imagens binárias ou de tons de cinza depende da escala, translação, rotação. A média, a variância de uma função f(x) são exemplos de momento desta função. Para uma imagem, o momento de ordem (p+q) é definido: i,j são coordenadas dos pixels da região
 são exemplos de momento desta função. Para uma imagem, o momento de ordem (p+q) é definido: i,j são coordenadas dos pixels da região.")
57
Momentos O momento da fórmula anterior foi definido sobre o ponto zero
Se o definirmos sobre a média, teremos um momento invariante à translação, conhecido como momento central onde xc e yc são os centros de gravidade (centróides) [médias] dados por Valor total imagem
 [médias] dados por. Valor total imagem.")
58
Momentos Momentos podem ser invariantes com relação a escala e há também propriedades que garantem independência da rotação e translação. [Sonka]

59
Representações por Região
Convex Hull (casco convexo) O que é convexo? Seja R uma região. H é um convex hull se ela é a menor região convexa que satisfaça R H A partir de Pk (no sentido anti-horário) encontre pq = minn n . Pq será um vértice do convex hull.
 O que é convexo Seja R uma região. H é um convex hull se ela é a menor região convexa que satisfaça R H. A partir de Pk (no sentido anti-horário) encontre pq = minn n . Pq será um vértice do convex hull.")
60
Representações por Região
Uma forma de representação da forma de uma região plana é a redução a um grafo Essa redução pode ser feita obtendo-se o esqueleto (skeleton) através de um algoritmo de “afinamento” (thinning)
 através de um algoritmo de afinamento (thinning)")
61
Thinning O esqueleto por ser definido pela Medial Axis Transformation (MAT) A MAT de uma região R com borda B p/ cada ponto p em R. encontre seu vizinho mais próximo (qq medida de distância). Se p tem mais de um vizinho, então, ele pertence ao eixo medial (medial axis) ou esqueleto da região. Cuidados dos algoritmos: manter conectividade não remover os pontos extremos (end points)
. Se p tem mais de um vizinho, então, ele pertence ao eixo medial (medial axis) ou esqueleto da região. Cuidados dos algoritmos: manter conectividade. não remover os pontos extremos (end points)")
62
Transformada da distância
Coloque fogo na borda da imagem: quanto tempo leva para o fogo atingir todos os pixels internos...?

63
Exemplos

64
Exemplo de MAT

Apresentações semelhantes






 Transporte balístico Um material unidimensional (confinado em duas dimensões) transporta carga quando uma voltagem é>")








>")



