Carregar apresentação
A apresentação está carregando. Por favor, espere

1
Descrição Matemática de Sistemas (C. T. Chen, Capítulo 2)
Sistemas Lineares

2
Supõe-se que a resposta a uma dada entrada é única
Supõe-se que a resposta a uma dada entrada é única. Esta relação única entre entrada e saída, excitação e resposta, causa e efeito, é essencial. Sistemas: SISO (Single Input, Single Output): 𝑥 𝑡 𝑦(𝑡) MIMO (Multiple Input, Multiple Output): 𝒙 𝑡 𝒚(𝑡) SIMO (Single Input, Multiple Output): 𝑥 𝑡 𝒚(𝑡)
: 𝑥 𝑡 𝑦(𝑡) MIMO (Multiple Input, Multiple Output): 𝒙 𝑡 𝒚(𝑡) SIMO (Single Input, Multiple Output): 𝑥 𝑡 𝒚(𝑡)")
3
Descrição matemática de sistemas
Um sistema é dito de tempo contínuo se aceita sinais de tempo contínuo como entrada e gera sinais de tempo contínuo na saída. Entra 𝑢(𝑡) ou 𝒖(𝑡), e sai 𝑦(𝑡) ou 𝒚(𝑡), sendo 𝒖= 𝑢 1 ⋯ 𝑢 𝑛 ′ (´ significa transposto). 𝑡 varia de - a +, em passo infinitesimal. Um sistema é dito de tempo discreto se aceita sinais de tempo discreto como entrada e gera sinais de tempo discreto na saída. Entra 𝑢 𝑘 ≔𝑢[𝑘𝑇] ou 𝒖 𝑘 , e sai 𝑦 𝑘 ≔𝑦[𝑘𝑇] ou 𝒚 𝑘 , sendo 𝒖= 𝑢 1 ⋯ 𝑢 𝑛 ′. Todos os sinais têm o mesmo tempo de amostragem 𝑇, e 𝑘 é um inteiro variando de - a +. Um sistema é chamado sem memória se sua saída em 𝑡 0 depende somente da entrada atual (em 𝑡 0 ). Um sistema é chamado com memória se a saída em 𝑡 0 depende da entrada atual, passada e futura. Um sistema é chamado de causal (ou não antecipatório), se a saída atual depende apenas de entradas passadas e atuais (nada de futuras). Nenhum sistema físico é não causal.
 ou 𝒖(𝑡), e sai 𝑦(𝑡) ou 𝒚(𝑡), sendo 𝒖= 𝑢 1 ⋯ 𝑢 𝑛 ′ (´ significa transposto). 𝑡 varia de - a +, em passo infinitesimal. Um sistema é dito de tempo discreto se aceita sinais de tempo discreto como entrada e gera sinais de tempo discreto na saída. Entra 𝑢 𝑘 ≔𝑢[𝑘𝑇] ou 𝒖 𝑘 , e sai 𝑦 𝑘 ≔𝑦[𝑘𝑇] ou 𝒚 𝑘 , sendo 𝒖= 𝑢 1 ⋯ 𝑢 𝑛 ′. Todos os sinais têm o mesmo tempo de amostragem 𝑇, e 𝑘 é um inteiro variando de - a +. Um sistema é chamado sem memória se sua saída em 𝑡 0 depende somente da entrada atual (em 𝑡 0 ). Um sistema é chamado com memória se a saída em 𝑡 0 depende da entrada atual, passada e futura. Um sistema é chamado de causal (ou não antecipatório), se a saída atual depende apenas de entradas passadas e atuais (nada de futuras). Nenhum sistema físico é não causal.")
4
Descrição matemática de sistemas
Até que tempo passado a entrada passada afetará a saída atual? Geralmente, é até -. Seguir as entradas desde - até o tempo atual, se não impossível, é muito inconveniente. O conceito de estado permite lidar com este problema.

5
Definição de estado O estado 𝒙( 𝑡 0 ) de um sistema no tempo 𝑡 0 é a informação em 𝑡 0 que, junto com a entrada 𝒖(𝑡), para 𝑡≥𝑡 0 , determina unicamente a saída 𝒚(𝑡) para todo 𝑡≥𝑡 0 . Conhecendo-se 𝒙( 𝑡 0 ), não é mais necessário conhecer os valores de 𝒖(𝑡) para 𝑡≤𝑡 0 . As variáveis 𝑥 𝑖 ( 𝑡 0 ) que compõem o vetor 𝒙 𝑡 0 = 𝑥 1 ( 𝑡 0 ) ⋯ 𝑥 𝑛 ( 𝑡 0 ) ′ são chamadas variáveis de estado. Assim, pode-se considerar o estado inicial simplesmente como um conjunto de condições iniciais, que sumariza o efeito da entrada passada na saída futura.
 de um sistema no tempo 𝑡 0 é a informação em 𝑡 0 que, junto com a entrada 𝒖(𝑡), para 𝑡≥𝑡 0 , determina unicamente a saída 𝒚(𝑡) para todo 𝑡≥𝑡 0 . Conhecendo-se 𝒙( 𝑡 0 ), não é mais necessário conhecer os valores de 𝒖(𝑡) para 𝑡≤𝑡 0 . As variáveis 𝑥 𝑖 ( 𝑡 0 ) que compõem o vetor 𝒙 𝑡 0 = 𝑥 1 ( 𝑡 0 ) ⋯ 𝑥 𝑛 ( 𝑡 0 ) ′ são chamadas variáveis de estado. Assim, pode-se considerar o estado inicial simplesmente como um conjunto de condições iniciais, que sumariza o efeito da entrada passada na saída futura.")
6
Descrição matemática de sistemas

7
Descrição matemática de sistemas
Utilizando o estado em 𝑡 0 , pode-se expressar a entrada e a saída do sistema como 𝒙( 𝑡 0 ) 𝒖 𝑡 , 𝑡≥ 𝑡 0 →𝑦 𝑡 , 𝑡≥ 𝑡 (2.1) Isto significa que a saída é parcialmente excitada pelo estado inicial em 𝑡 0 e parcialmente excitada pelo sinal de entrada em e após 𝑡 0 . Logo, não há como conhecer a saída sem conhecer a entrada e o estado (inicial). Em outras palavras, tem-se um par entrada-estado/saída, e não somente entrada/saída.
 𝒖 𝑡 , 𝑡≥ 𝑡 0 →𝑦 𝑡 , 𝑡≥ 𝑡 0 (2.1) Isto significa que a saída é parcialmente excitada pelo estado inicial em 𝑡 0 e parcialmente excitada pelo sinal de entrada em e após 𝑡 0 . Logo, não há como conhecer a saída sem conhecer a entrada e o estado (inicial). Em outras palavras, tem-se um par entrada-estado/saída, e não somente entrada/saída.")
8
Descrição matemática de sistemas
Um sistema é agrupado (concentrado) (lumped) se o número de variáveis de estado é finito. Um sistema é distribuído se seu estado tem infinitas variáveis.
 (lumped) se o número de variáveis de estado é finito. Um sistema é distribuído se seu estado tem infinitas variáveis.")
9
Sistemas lineares Um sistema é chamado de sistema linear, se para todo 𝑡 0 e dois conjuntos estado-entrada-saída quaisquer

10
Sistemas lineares Combinando as propriedades anteriores, obtém-se a propriedade de superposição

11
Sistemas lineares A saída é chamada de resposta à entrada zero quando
A saída é chamada de resposta ao estado zero quando Resposta = resposta à entrada zero + resposta ao estado zero (Devido à propriedade da aditividade) (Note-se que isto não ocorre para sistemas não lineares)
 (Note-se que isto não ocorre para sistemas não lineares)")
12
Sistemas lineares Descrição entrada-saída. Desenvolve-se uma equação matemática para descrever a resposta ao estado zero de sistemas lineares (implicitamente, o estado inicial e assumido como zero). Considere-se o seguinte sinal pulso.
. Considere-se o seguinte sinal pulso.")
13
Sistemas lineares A entrada 𝑢(𝑡) pode ser aproximada por uma sequência de impulsos.
 pode ser aproximada por uma sequência de impulsos.")
14
Sistemas lineares A saída no tempo 𝑡 excitada pelo pulso no tempo 𝑡 𝑖 é Depois

15
Sistemas lineares Quando delta aproxima-se de zero, obtém-se
Um sistema é relaxado em 𝑡 0 se seu estado inicial em 𝑡 0 é 0. Então, todo sistema linear que é causal e relaxado em 𝑡 0 pode ser descrito como

16
Caso multivariável

17
Descrição no espaço de estados
Todo sistema linear agrupado pode ser descrito por um conjunto de equações da forma

18
Sistemas LTI Sistema lineares invariantes no tempo (LTI)
")
19
Sistemas LTI A descrição entrada-saída fica
Esta é a chamada integral de convolução, e representa a descrição do sistema LTI no domínio do tempo.

20
Sistemas LTI Função de transferência dos sistemas LTI

21
Sistemas LTI A função de transferência do sistema é a transformada de Laplace da resposta impulsiva (resposta ao impulso). A resposta impulsiva é a transformada inversa de Laplace da função de transferência.

22
Sistemas LTI Para um sistema de p entradas e q saídas

23
Sistemas LTI A função de transferência do sistema de retardo é uma função de transferência irracional porque se trata de um sistema distribuído. Se o sistema LTI é agrupado, então sua função de transferência será uma função racional.

24
Sistemas LTI

25
Sistemas LTI Toda função de transferência racional pode ser expressa por

26
Sistemas LTI Uma função de transferência racional imprópria amplificará ruídos de alta freqüência. Portanto, esta função de transferência raramente é utilizada em aplicações práticas.

27
Sistemas LTI Definição:

28
Sistemas LTI

29
Equação no espaço de estados
Todo sistema linear agrupado invariante no tempo, pode ser descrito por a partir de onde se pode obter a matriz de transferência caso 𝒙 0 =𝟎.

30
Linearização Muitos sistemas físicos são não lineares e variantes no tempo. Alguns deles podem ser descritos pela equação diferencial não linear Considere-se

31
Linearização Então o sistema pode ser expandido

32
Linearização Omitindo a ordens altas de

33
Exemplo 1 Não lineares, e sem possibilidade de linearizar com erro pequeno. Linear Será considerado apenas o atrito viscoso ( 𝑘 1 𝑦 (t), sendo 𝑘 1 o coeficiente de atrito viscoso).
, sendo 𝑘 1 o coeficiente de atrito viscoso).")
34
Exemplo 1 Figura 2.10 Característica da mola (não linear).
Porém, se o deslocamento for limitado ao intervalo 𝑦 1 , 𝑦 2 , então a mola pode ser considerada como linear, com boa aproximação, e a força por ela exercida será 𝑘 2 𝑦, sendo 𝑘 2 a constante da mola.

35
Exemplo 1 Pela Lei de Newton:
𝑚 𝑦 =𝑢− 𝑘 1 𝑦 − 𝑘 2 𝑦 (2.22), sendo 𝑦 = 𝑑 2 𝑦(𝑡) 𝑑 𝑡 2 e 𝑦 = 𝑑𝑦(𝑡) 𝑑𝑡 . Aplicando a transformada de Laplace, assumindo condições iniciais nulas, obtém-se 𝑚 𝑠 2 𝑦 𝑠 = 𝑢 𝑠 − 𝑘 1 𝑠 𝑦 𝑠 − 𝑘 2 𝑦 𝑠 , o que resulta na descrição entrada-saída do sistema 𝑦 𝑠 = 1 𝑚 𝑠 2 + 𝑘 1 𝑠+ 𝑘 2 𝑢 𝑠 e na sua função de transferência 𝑔 𝑠 = 1 𝑚 𝑠 2 + 𝑘 1 𝑠+ 𝑘 2
, sendo 𝑦 = 𝑑 2 𝑦(𝑡) 𝑑 𝑡 2 e 𝑦 = 𝑑𝑦(𝑡) 𝑑𝑡 . Aplicando a transformada de Laplace, assumindo condições iniciais nulas, obtém-se. 𝑚 𝑠 2 𝑦 𝑠 = 𝑢 𝑠 − 𝑘 1 𝑠 𝑦 𝑠 − 𝑘 2 𝑦 𝑠 , o que resulta na descrição entrada-saída do sistema. 𝑦 𝑠 = 1 𝑚 𝑠 2 + 𝑘 1 𝑠+ 𝑘 2 𝑢 𝑠. e na sua função de transferência. 𝑔 𝑠 = 1 𝑚 𝑠 2 + 𝑘 1 𝑠+ 𝑘 2.")
36
Exemplo 1 𝑔 𝑡 = ℒ −1 1 𝑠 2 +3𝑠+2 = ℒ −1 1 𝑠+1 − 1 𝑠+2 = 𝑒 −𝑡 − 𝑒 −2𝑡
Se 𝑚=1, 𝑘 1 =3 e 𝑘 2 =2, a função de transferência do sistema se torna 𝑔 𝑠 = 1 𝑠 2 +3𝑠+2 sua resposta ao impulso do sistema será 𝑔 𝑡 = ℒ − 𝑠 2 +3𝑠+2 = ℒ −1 1 𝑠+1 − 1 𝑠+2 = 𝑒 −𝑡 − 𝑒 −2𝑡 e sua descrição por convolução será 𝑦 𝑡 = 0 𝑡 𝑔 𝑡−𝜏 𝑢 𝜏 𝑑𝜏= 0 𝑡 𝑒 − 𝑡−𝜏 − 𝑒 −2 𝑡−𝜏 𝑢 𝜏 𝑑𝜏

37
Exemplo 1 Quanto à descrição deste mesmo sistema no espaço de estados, sejam as variáveis de estado 𝑥 1 =𝑦 e 𝑥 2 = 𝑦 Daí, a partir de (2.22) podemos escrever 𝑥 1 = 𝑥 2 𝑚 𝑥 2 =𝑢− 𝑘 1 𝑥 2 − 𝑘 2 𝑥 1 Daí, se obtém a descrição no espaço de estados do sistema, que é 𝑥 1 (𝑡) 𝑥 2 (𝑡) = 0 1 − 𝑘 2 𝑚 − 𝑘 1 𝑚 𝑥 1 (𝑡) 𝑥 2 (𝑡) 𝑚 𝑢 𝑡 𝑦 𝑡 = 𝑥 1 (𝑡) 𝑥 2 (𝑡)
 podemos escrever. 𝑥 1 = 𝑥 2. 𝑚 𝑥 2 =𝑢− 𝑘 1 𝑥 2 − 𝑘 2 𝑥 1. Daí, se obtém a descrição no espaço de estados do sistema, que é. 𝑥 1 (𝑡) 𝑥 2 (𝑡) = 0 1 − 𝑘 2 𝑚 − 𝑘 1 𝑚 𝑥 1 (𝑡) 𝑥 2 (𝑡) 𝑚 𝑢 𝑡. 𝑦 𝑡 = 1 0 𝑥 1 (𝑡) 𝑥 2 (𝑡)")
38
Exemplo 2

39
Exemplo 3

41
Exemplo

42
Exemplo

43
Exemplo

44
Linearização de um sistema de nível

46
Sistemas de tempo discreto
Assume-se que o período de amostragem T é igual para todo sistema de tempo discreto. Muitos conceitos aplicados a sistemas de tempo contínuo se aplicam a sistemas de tempo discreto. Porém, alguns conceitos variam. Por exemplo, em sistemas contínuos um sistema de retardo é distribuído, mas em sistemas discretos o sistema de retardo é agrupado se o retardo é um inteiro múltiplo de T.

47
Sistemas de tempo discreto
Descrição entrada saída. Seja a seqüência impulso Seguindo um procedimento similar ao utilizado em sistemas contínuos, obtém-se a descrição entrada saída para sistemas relaxados em 𝑘 0 e causais.

48
Sistemas de tempo discreto
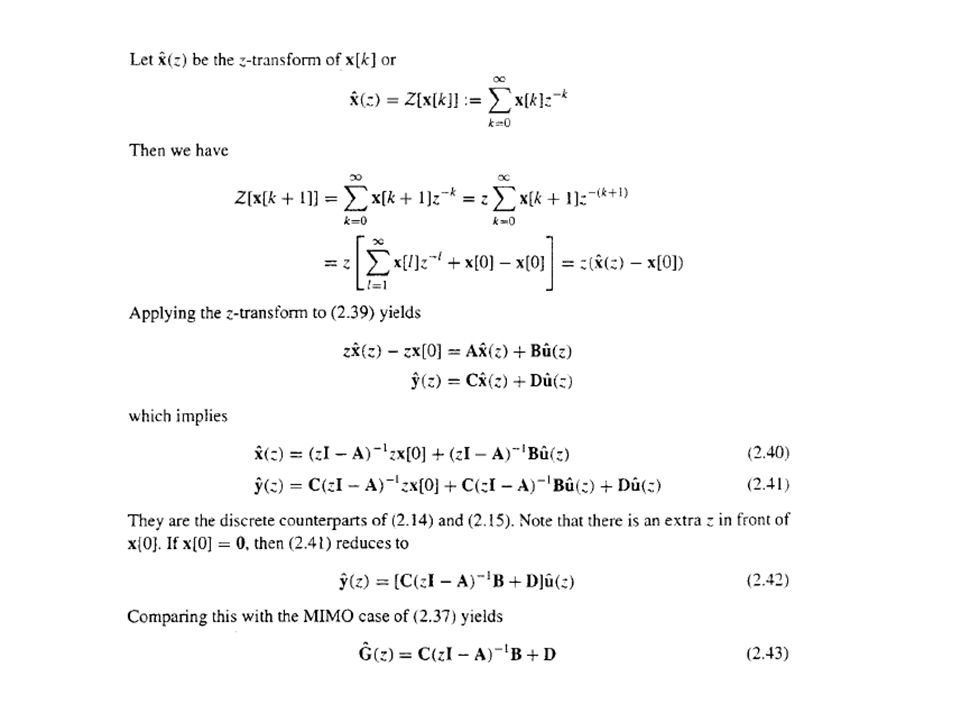
Seja a transformada Z Depois

49
Sistemas de tempo discreto
Exemplo de um sistema de tempo discreto distribuído

50
Sistemas de tempo discreto
Uma função de transferência racional discreta pode ser própria ou imprópria. Se é imprópria como Obtém-se um sistema não causal. O resultado é distinto em sistemas de tempo contínuo, onde uma função de transferência racional imprópria pode ser de um sistema causal.

51
Para 𝑔 𝑠 =𝑠, dependendo de como a derivada é calculada, o sistema discreto pode ser causal ou não.

52
Sistemas de tempo discreto
Equações no espaço de estados

54
Exemplo Considere uma conta de poupança com rendimento diário de r=0.015% u[k] é a quantia depositada no dia k y[k] é a quantia total ao final do dia k Considere um depósito de R$ 1 no início do primeiro dia, e nada nos demais dias, ou seja, u[k]=[ ]. Daí, y[0]=u[0]=1, e y[1]=0, =1,00015 𝑦 2 =𝑦 1 +𝑦 1 .0,00015=𝑦 1 .1,00015= 1, , donde se conclui que 𝑦 𝑘 = 1, 𝑘
![Exemplo Considere uma conta de poupança com rendimento diário de r=0.015% u[k] é a quantia depositada no dia k.](http://slideplayer.com.br/slide/1679020/6/images/54/Exemplo+Considere+uma+conta+de+poupan%C3%A7a+com+rendimento+di%C3%A1rio+de+r%3D0.015%25+u%5Bk%5D+%C3%A9+a+quantia+depositada+no+dia+k..jpg "y[k] é a quantia total ao final do dia k. Considere um depósito de R$ 1 no início do primeiro dia, e nada nos demais dias, ou seja, u[k]=[ ]. Daí, y[0]=u[0]=1, e y[1]=0, =1, 𝑦 2 =𝑦 1 +𝑦 1 .0,00015=𝑦 1 .1,00015= 1, , donde se conclui que 𝑦 𝑘 = 1,00015 𝑘.")
55
Modelos do exemplo

Apresentações semelhantes








>")











: sincronismo de tarefas,>")